决策树 | 树模型⚓︎
约 5413 个字 7 张图片 预计阅读时间 18 分钟 总阅读量 次
深入理解决策树 (Decision Tree) 模型⚓︎
决策树是后续更复杂的集成模型(如随机森林、XGBoost)的基础,理解它至关重要。
解决的问题与作用⚓︎
决策树 (Decision Tree) 是一种基本的监督学习算法,可用于分类和回归任务。
它试图解决的问题是:通过从数据中学习一系列简单的决策规则,来构建一个模型,用于预测目标变量的值。
- 作用/优点:
- 可解释性强:模型形式为树状结构,非常直观,易于向非技术人员解释。这种模型通常被称为“白盒模型”。
- 计算简单:预测阶段的计算成本很低。
- 数据预处理要求低:不需要对数据进行归一化或标准化。
- 能够处理混合类型数据:可以同时处理数值型和类别型特征。
算法流程⚓︎
决策树的生成是一个递归构建的过程,遵循“分而治之”的策略。
- 开始:所有训练数据都在根节点。
- 特征选择:遍历当前节点中所有数据的每一个特征,选择一个最优切分特征和一个最优切分点。这个“最优”的标准是使得分裂后的子节点“纯度”最高(或者说不确定性最小)。
- 分裂:根据最优特征和切分点,将当前节点的数据集划分为多个子集,每个子集构成一个新的子节点。
- 递归:对每个子节点,递归地重复步骤 2 和 3。
- 停止:递归在以下情况停止,当前节点成为叶子节点:
- 当前节点的所有样本都属于同一个类别。
- 没有剩余的特征可以用来进行划分。
- 达到了预设的停止条件,如树的最大深度、节点最小样本数等(这是预剪枝策略)。
重要知识点(面试核心)⚓︎
决策树的核心在于如何选择最优切分特征。历史上主要有三种经典算法,它们的主要区别就在于这个选择标准。
-
ID3 算法 -> 信息增益 (Information Gain)
- 核心思想:选择一个特征进行分裂,使得分裂后的信息不确定性下降得最多。这种不确定性的下降程度就叫做“信息增益”。
-
度量标准:熵 (Entropy)。熵用来度量一个数据集的纯度,熵越小,纯度越高。
\[ \text{Entropy}(D) = -\sum_{k=1}^{|\mathcal{Y}|} p_k \log_2(p_k) \]其中,\(D\) 是数据集,\(|\mathcal{Y}|\) 是类别总数,\(p_k\) 是第 \(k\) 类样本在数据集 \(D\) 中所占的比例。
我们在每次分支的时候,都希望这个熵尽可能地小,这样,每一个分支都是尽可能地“Pure”(纯净)的。
-
信息增益:分裂前的数据集熵,减去分裂后所有子节点熵的加权平均。 $$ \text{Gain}(D, A) = \text{Entropy}(D) - \sum_{v=1}^{V} \frac{|D^v|}{|D|} \text{Entropy}(D^v) $$
其中,\(A\) 是用来分裂的特征,\(V\) 是特征 \(A\) 的取值个数,\(D^v\) 是 \(D\) 中在特征 \(A\) 上取值为 \(v\) 的样本子集。 * 缺点:信息增益偏爱取值较多的特征。一个特征的取值越多,分裂出的子节点就越多、越“纯”,算出来的增益就越大。极端情况下,如果一个特征对每个样本都有唯一的值(如学号ID),那么它的信息增益最大,但这显然是无用的。
在选择一个特征进行分支后,我们希望所有子节点的加权平均熵尽可能小
一个节点的熵代表了这个节点数据的不确定性或“不纯度”。
- 熵最大 (最不纯):当一个节点中,各个类别的样本数量完全相等时,熵达到最大值。例如,一个节点有50个正样本和50个负样本,此时我们完全无法判断这个节点的倾向,不确定性最高。
- 熵最小 (最纯):当一个节点中,所有样本都属于同一个类别时,熵为0。例如,一个节点有100个正样本和0个负样本,此时没有任何不确定性,这个节点已经是“纯”的。
因此,决策树的目标就是,通过一次分裂,将一个“不纯的”父节点,分裂成多个“尽可能纯的”子节点。
如果两个新分出的支,每一支都有较多的类别,那很显然这种分支是不好的。“每一支都有较多的类别”就意味着每一支(每个子节点)的熵都很高,纯度很低。这说明这次分裂并没有带来多少有价值的信息,我们仍然无法对子节点中的样本做出有效判断。这样的分裂是低效的、不好的。
假设我们有一个数据集,包含14个样本,目标是预测是否“打网球”。其中有9个“是”和5个“否”。
这个根节点的初始熵是:
\[
\text{Entropy}(\text{Root}) = -\left(\frac{9}{14}\log_2\frac{9}{14} + \frac{5}{14}\log_2\frac{5}{14}\right) \approx 0.940
\]
这是一个比较高的熵,代表节点很不纯。
分裂方案A:一个好的分裂(按“天气”特征
假设我们按“天气”这个特征来分裂,得到三个子节点: * 子节点1 (天气=晴天):包含5个样本 [2个是, 3个否]。 * 这个节点的熵不为0,但纯度比根节点高了一点。 * 子节点2 (天气=阴天):包含4个样本 [4个是, 0个否]。 * 这个节点的熵为0!它是一个纯节点。所有阴天都去打球了。这是一个非常有价值的信息。 * 子节点3 (天气=雨天):包含5个样本 [3个是, 2个否]。 * 这个节点的熵也不为0,但纯度也比根节点高了一点。
这个分裂是好的,因为它产生了一个熵为0的纯节点,并且其他节点的纯度也得到了一定提升。
分裂方案B:一个坏的分裂(按“风力”特征)
假设我们按“风力”来分裂,得到两个子节点: * 子节点1 (风力=弱):包含8个样本 [6个是, 2个否]。 * 熵 \(\approx 0.811\)。 * 子节点2 (风力=强):包含6个样本 [3个是, 3个否]。 * 熵 \(\approx 1.0\)。这是熵的最大值!
这个分裂是不好的。虽然“风力弱”节点的纯度有所提升,但“风力强”这个节点变得更加不纯了(从9:5变成了3:3)。整体来看,这次分裂提供的信息量有限。
-
C4.5 算法 -> 信息增益率 (Gain Ratio)
- 核心思想:为了克服 ID3 的缺点,C4.5 引入了信息增益率。它在信息增益的基础上,除以一个“分裂信息”(Split Information),对取值数目多的特征进行惩罚。
-
分裂信息:特征本身的不确定性,特征取值越多,分裂信息越大。
\[ \text{SplitInfo}(D, A) = -\sum_{v=1}^{V} \frac{|D^v|}{|D|} \log_2\left(\frac{|D^v|}{|D|}\right) \] -
信息增益率:
\[ \text{GainRatio}(D, A) = \frac{\text{Gain}(D, A)}{\text{SplitInfo}(D, A)} \] -
C4.5 就是选择信息增益率最高的特征进行分裂。
-
CART 算法 -> Gini 系数 (Gini Impurity)
- 适用范围:Classification and Regression Tree (CART),既能分类也能回归 。现在常见的库(如 scikit-learn)中的决策树多是基于 CART 实现的。
- 核心思想:选择一个特征进行分裂,使得分裂后的基尼不纯度下降得最多。
-
基尼不纯度 (Gini Impurity):表示从一个数据集中随机抽取两个样本,其类别标签不一致的概率。基尼不纯度越小,数据集纯度越高。
\[ \text{Gini}(D) = 1 - \sum_{k=1}^{|\mathcal{Y}|} p_k^2 \] -
选择标准:遍历所有特征和所有可能的切分点,计算分裂后的基尼不纯度。选择那个能使基尼不纯度下降最多的分裂方式。
\[ \Delta \text{Gini}(A) = \text{Gini}(D) - \sum_{v=1}^{V} \frac{|D^v|}{|D|} \text{Gini}(D^v) \] -
注意,系数 \(\frac{|D^v|}{|D|}\) 帮助给样本数量较多的分支赋予更高的权重。
- 优点:与熵的计算相比,基尼系数的计算不涉及对数,计算速度更快。
- 谨记:每次在一个节点进行分支的时候,都需要在所有可选的特征下,选择一个最好的特征。
- 最后,在分类问题中,怎么确定每个叶子结点输出的类别呢?看这个叶子结点下哪个类别的样本数多就行了。
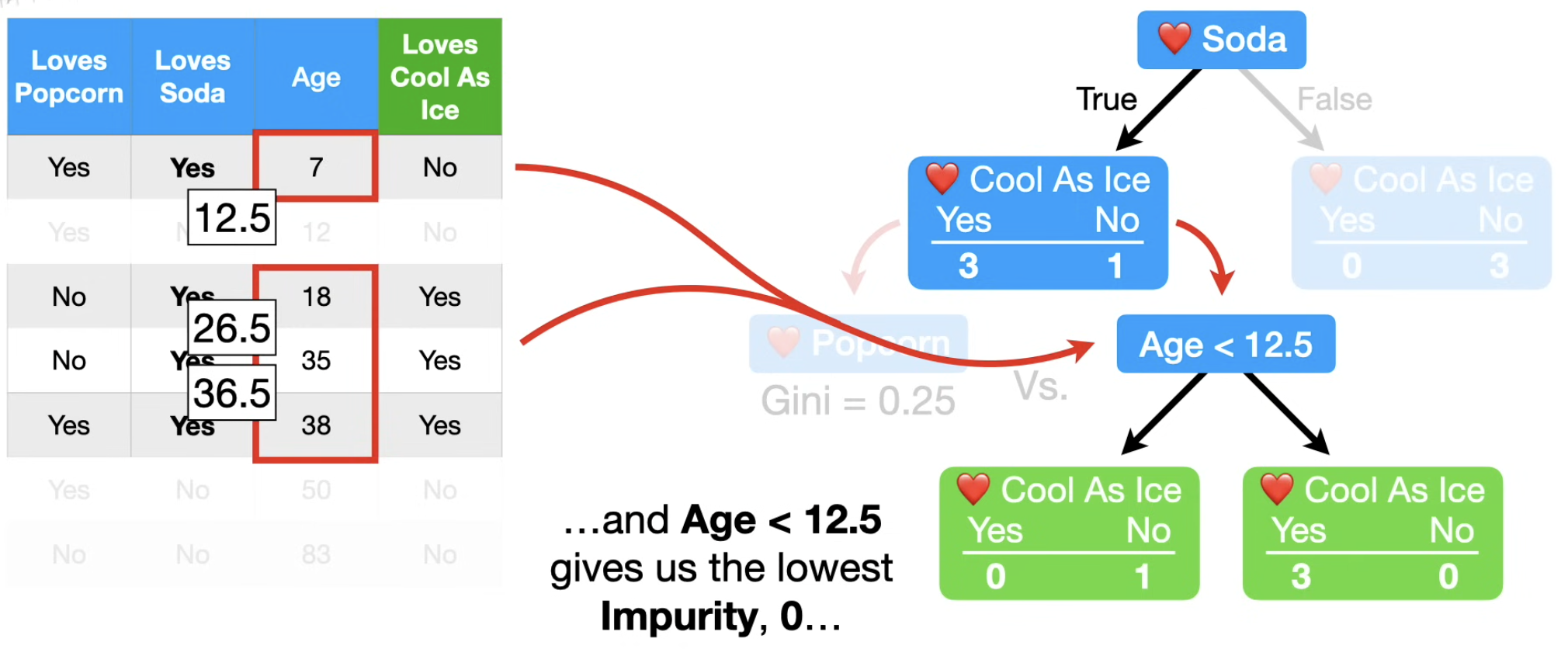
如果是对数值特征(而不是类别特征)进行分类,比如,工作时间 这个特征,此时如何决定分支的阈值参数呢? ( > ? 是一类,<= 是另一类)
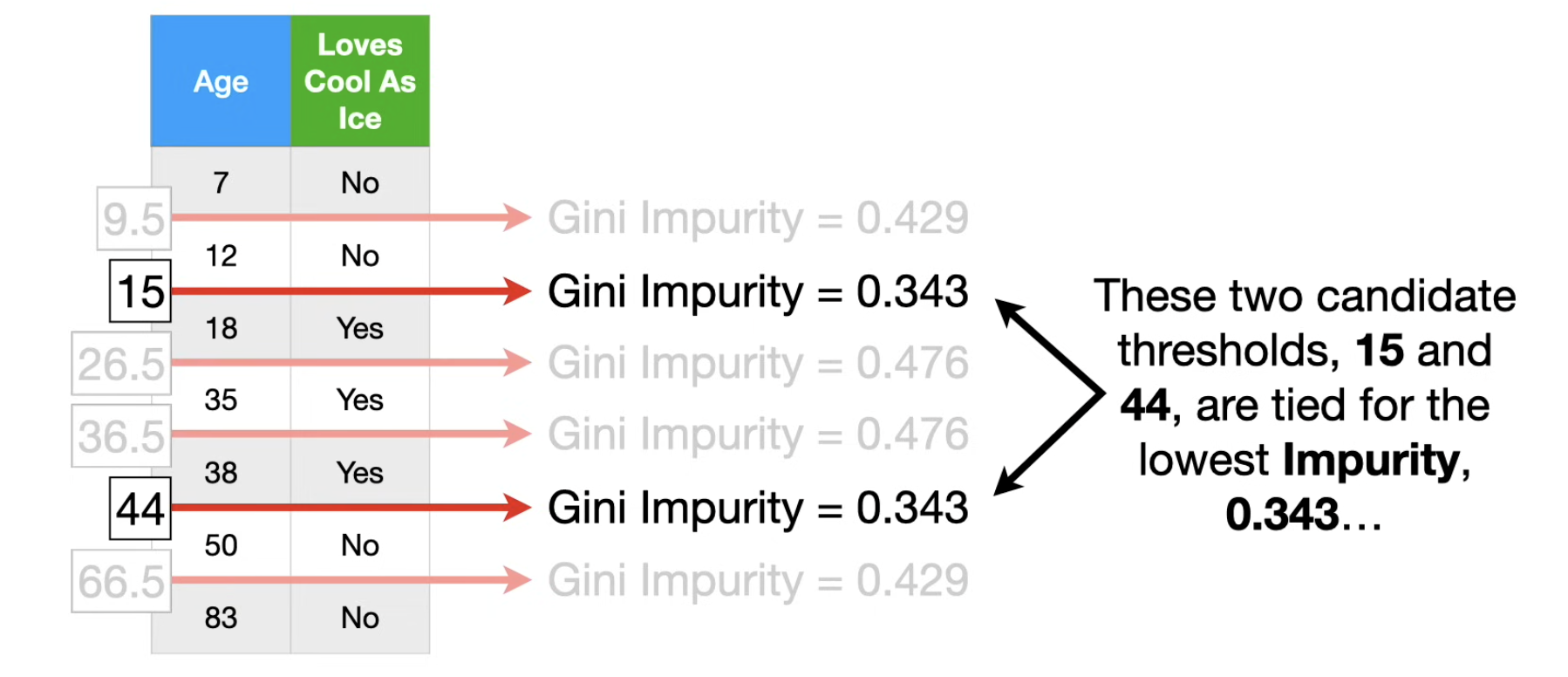
先对所有样本的该特征进行排序,对所有唯一元素,两两取均值,就得到了==该特征下可供分支的所有备选的阈值参数==。
对每个备选的阈值参数,分别计算以这个阈值参数分支后的Gini系数,选出最小的那个,就是==在当前节点处,以该特征进行分支的最好阈值参数了==。
针对过拟合的处理 (🌟)⚓︎
决策树如果不做处理,单个决策树很容易过拟合(学到过多训练数据中的噪声),剪枝是防止过拟合的主要手段。一些策略包括:
- 预剪枝 (Pre-pruning):在树的生长过程中,提前停止。例如限制树的深度、限制叶子节点的最小样本数等,即使叶子结点不是 Pure 的(不同类都有),但是样本数已经很少了(或者已经Branch了很多层),此时就不需要继续 Branch 了。这个结点就当作叶子结点,输出的值(类别)就是这个结点中数量最多的那个类。
- 后剪枝 (Post-pruning):先生成一棵完整的决策树,然后自底向上地考察非叶子节点,如果:将该节点对应的子树替换为叶子节点能带来性能提升(如在验证集上),则进行替换。这个步骤也可以视为一个特征选择的过程:在某些阶段,选择某些特征进行分支,甚至可能导致效果更差了。
算法复杂度分析⚓︎
- 训练复杂度:假设有 \(n\) 个样本, \(m\) 个特征。在构建树的每一层,都需要遍历所有特征和所有样本来寻找最佳分裂点。如果特征是连续值,通常需要先排序,排序复杂度为 \(O(n \log n)\)。所以每层的复杂度大约是 \(O(m \times n \log n)\)。树的深度最好情况下是 \(O(\log n)\)。因此,总的训练复杂度较高,粗略估计为 \(O(m \times n \log n \times \text{depth})\)。
- 预测复杂度:非常快。只需要从根节点走到一个叶子节点。树的深度通常是 \(O(\log n)\) 级别,所以预测一个样本的复杂度是 \(O(\log n)\),或者 \(d_{depth}\),也就是树的深度。
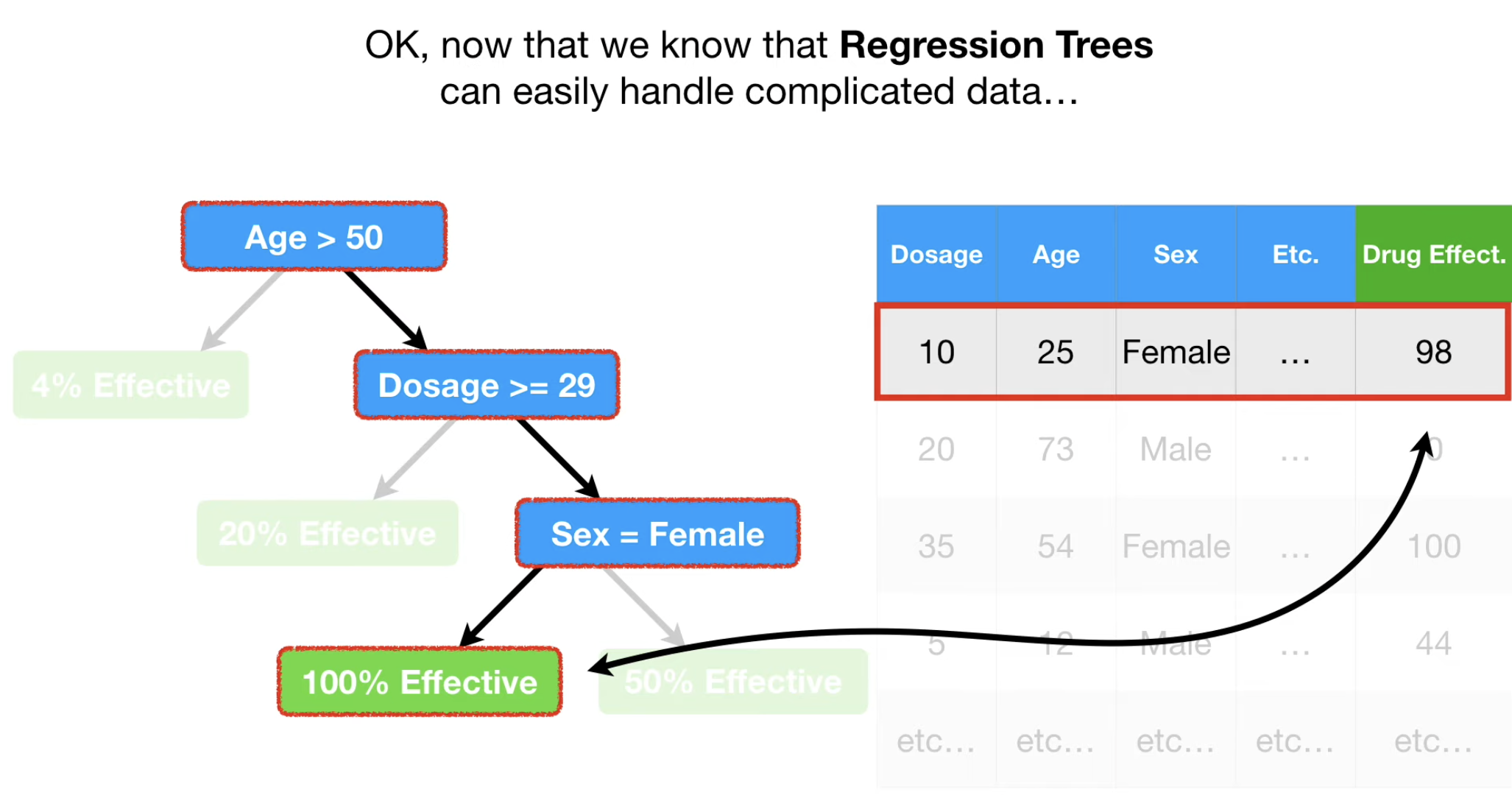
从分类到回归: CART⚓︎
我们同样可以把上面的用于分类的决策树,变成用于回归分析的,此时每个叶子结点,输出的不再是“属于某个类别”,而是某个概率。
同时,这种方式适合特征较多的情况下,给出“在满足某些特征的约束下,某个事件的概率”,这种问题。。
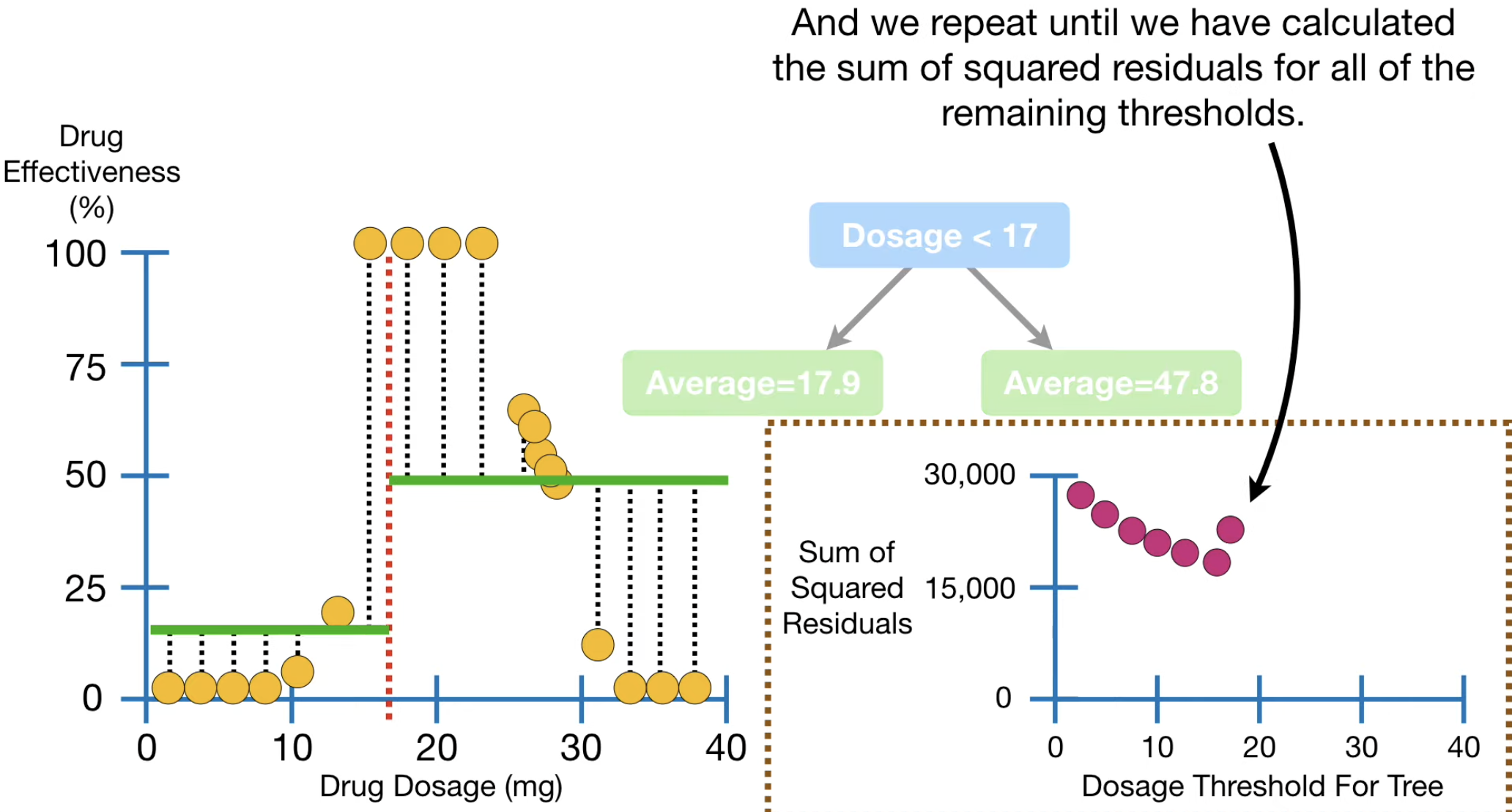
问题就来了,对于一个回归树,在某个特征进行Branch时,如何确定每个结点 branch 的阈值呢?
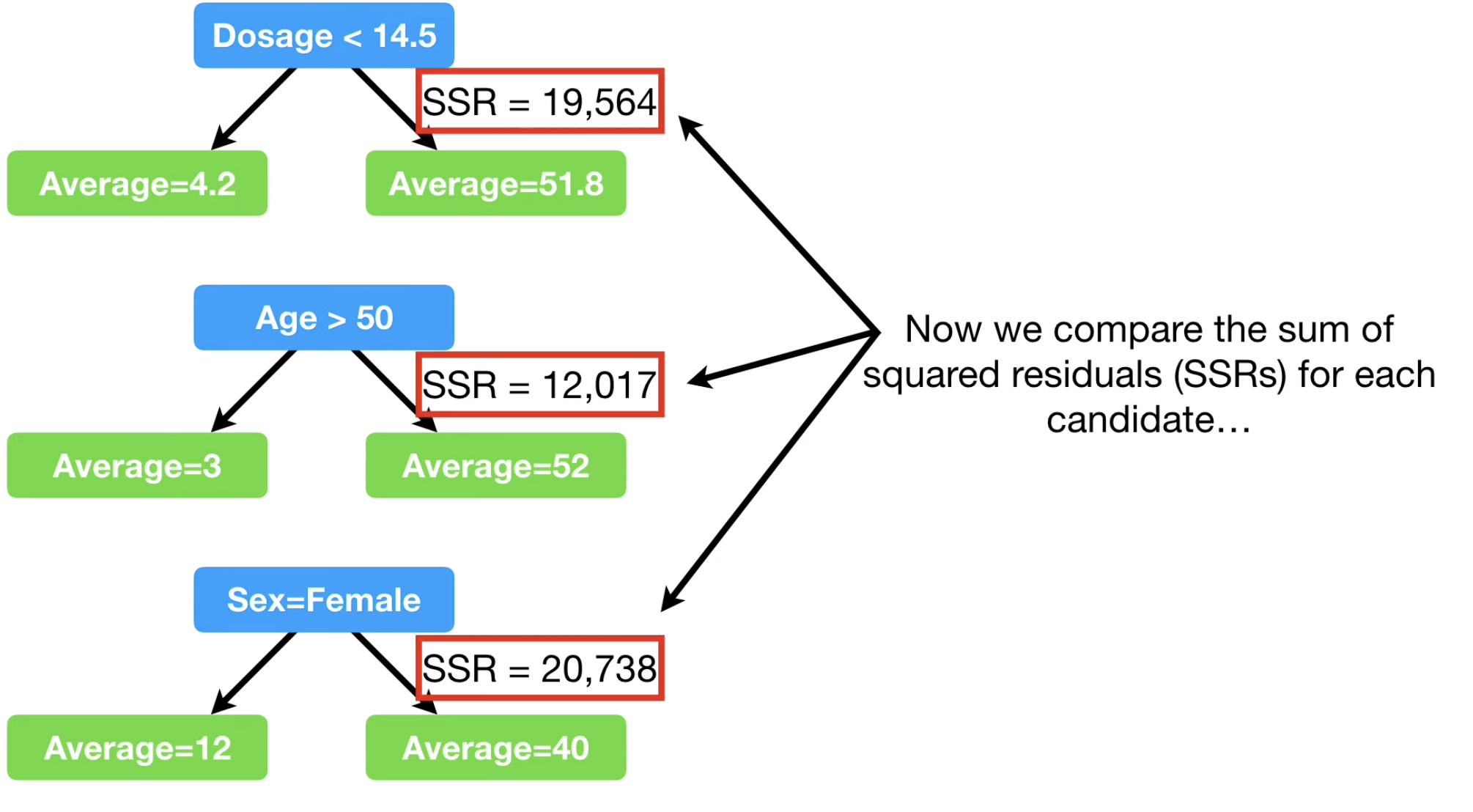
答案也不难,针对样本中该特征所有数值进行分支,这个分支会把样本分成两部分,每部分给出的预测概率,就是每部分样本真实概率(或者,数值)的均值。然后计算这个均值下,样本的 MSE (均方误差)。找到最小的那个阈值即可。
此时,你可以发现,最终建立的这棵树,其输出的叶子结点的“数值”,实际上是“符合某些特征的阈值条件的样本的目标值的均值”。
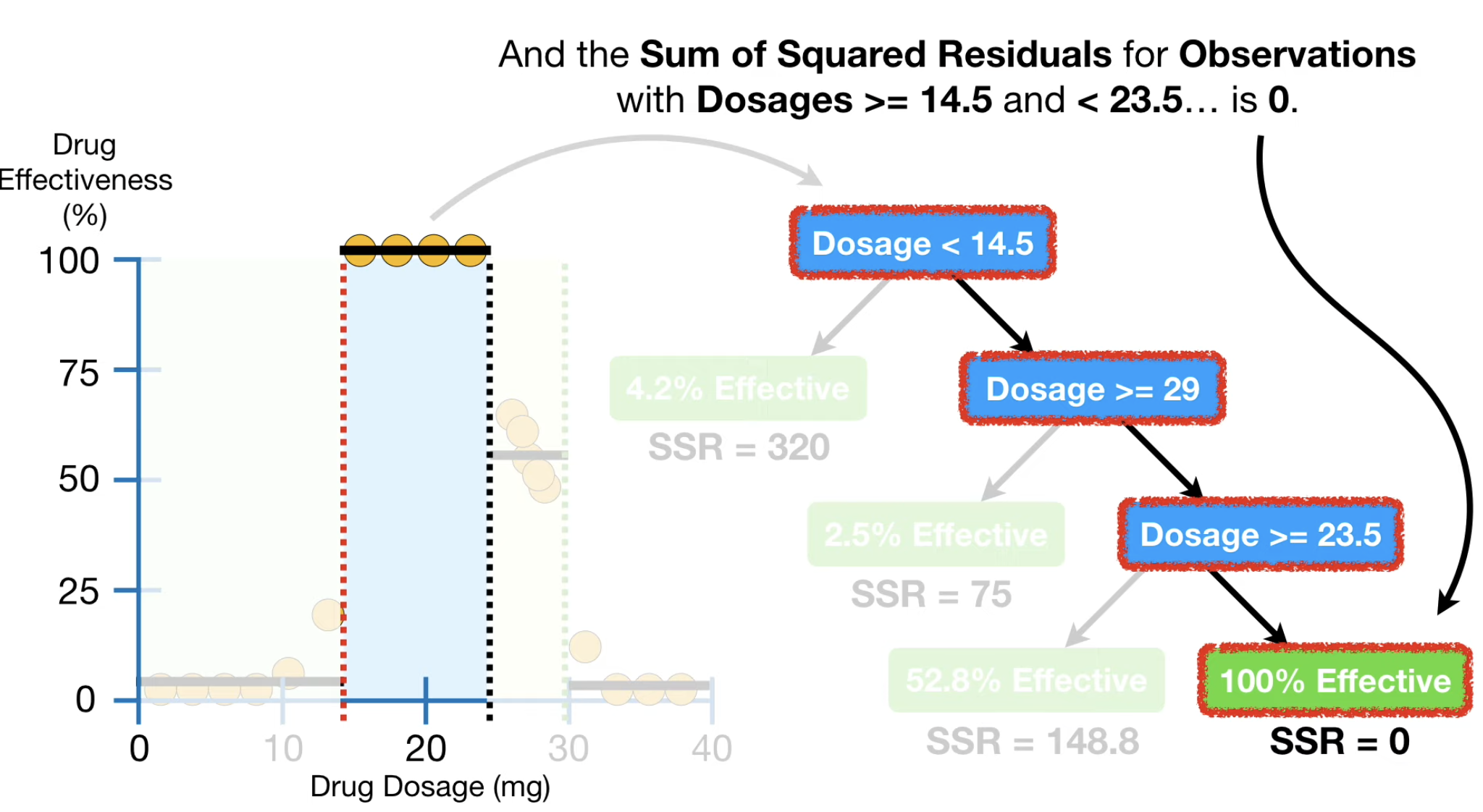
如法炮制,如果我们有多个特征,那更简单了,我们对每个特征(不管是数值、类别),都可以找到那个最好的分支 threshold,并且可以算出,这个最好的阈值分类下的总平方误差,选择那个最小的,进行分支即可。如下图所示。
在回归树的情况下,那些常见的防止过拟合的策略依然是 work 的,比如要求某分支的样本数量不得小于某个阈值, 这样,一些node就不会继续分支了。
Cost Complexity Pruning⚓︎
关于剪枝策略的进一步优化:Cost Complexity Pruning, aka Weakest Link Pruning
代价复杂度剪枝 (Cost-Complexity Pruning, CCP) 是一个非常经典且重要的剪枝策略,它正是 CART (Classification and Regression Trees) 算法中使用的官方后剪枝方法。
CCP 的核心思路是:在“模型准确度”和“模型复杂度”之间进行显式的、可量化的权衡(trade-off)。
它不是简单地看剪掉一个节点后验证集精度是否提升,而是引入一个正则化思想。它定义了一个新的代价函数,既包含树的预测误差,也包含树的复杂度(大小),然后去寻找能最小化这个新代价函数的子树。
这个代价函数,即代价复杂度 (Cost-Complexity),其定义如下:
\[
R_{\alpha}(T) = R(T) + \alpha|T|
\]
- \(T\):代表一棵子树。
- \(R(T)\):树的误差。对于回归树,这通常是这棵树在训练集上的总平方误差和 (SSE)。对于分类树,可以是错分类样本数或者基尼不纯度总和。
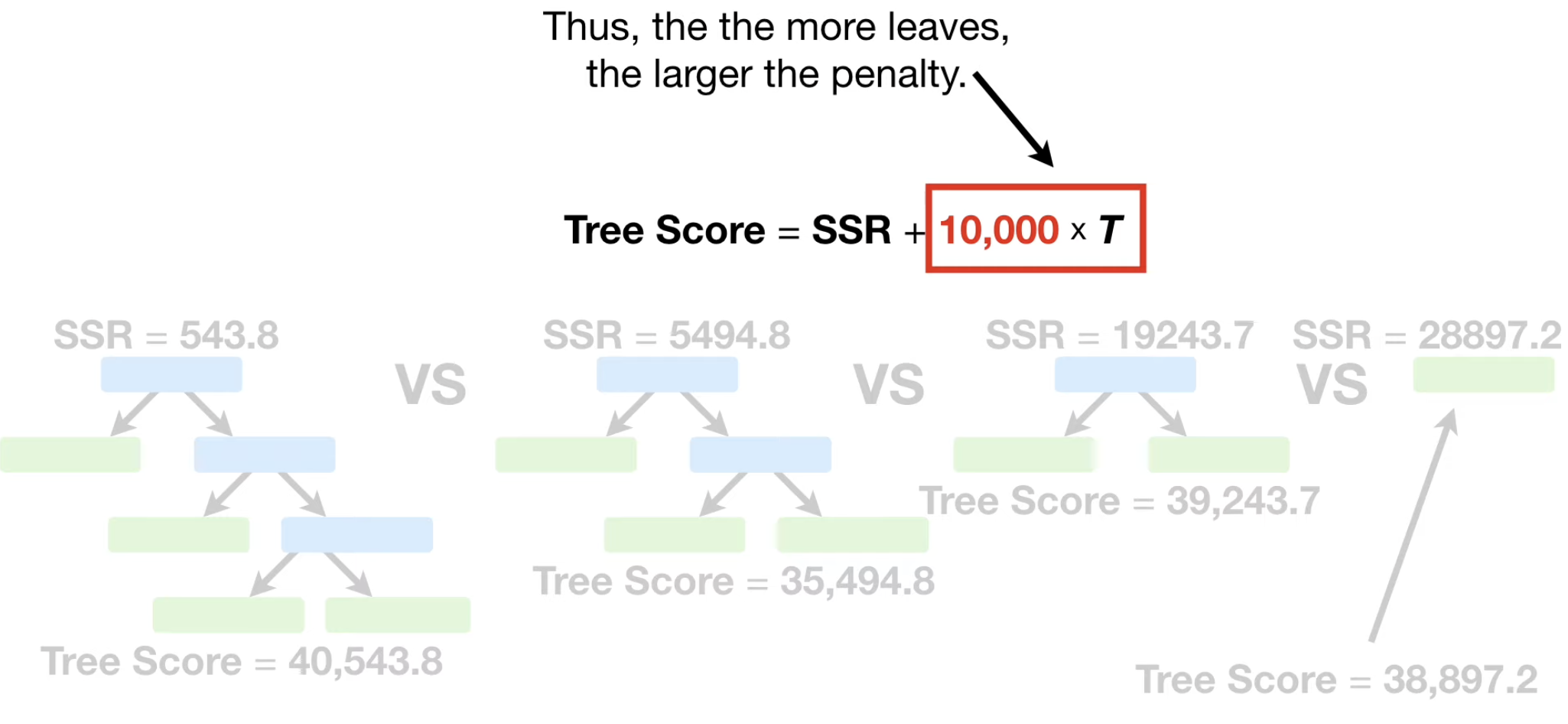
- \(|T|\):树的复杂度,通常用叶子节点的数量来衡量。叶子越多,树越复杂,而==因为过多地进行 Branch 可能导致过拟合==,这个正则项可以认为是用来预防过拟合的。
- \(\alpha\):复杂度惩罚参数 (Complexity Parameter),这是一个非负的超参数(\(\alpha \ge 0\))。它控制着我们对模型复杂度的惩罚力度。
核心思路可以总结为:对于一个给定的 \(\alpha\),CCP 会找到一棵子树 \(T\),使得 \(R_{\alpha}(T)\) 的值最小。 1. 如果 \(\alpha = 0\),没有复杂度惩罚,那么最优的树就是未剪枝的、最完整的树 \(T_0\),因为它的训练误差 \(R(T_0)\) 最小。 2. 如果 \(\alpha \to \infty\),我们对复杂度的惩罚极重,任何一个多余的叶子节点都会带来巨大的代价。此时,最优的树就是一个只包含根节点的树(\(|T|=1\)),因为它最简单。
比如,对于 后剪枝 策略来说(将一些叶子结点删掉,不在某些结点继续 Prune,那么如何选择删去哪些叶子结点呢?)
我们可以保留下每个叶子结点导致的 MSE (下图中为 Sum of Squred Residuals,类似),这样计算出整棵树导致的 MSE。
我们来一步步拆解它。
有效防止过拟合:这是所有剪枝策略的共同目标。通过简化模型,CCP 降低了模型对训练数据噪声的拟合程度,从而提升了在未见数据上的泛化能力。
提供一个最优的子树序列:CCP 最独特的优点是,它不只是给出一个剪枝后的树,而是能够生成一个从完整大树到根节点树的、嵌套的、最优子树序列。这为后续选择最佳模型提供了极大的便利。
这个别名的由来非常形象地解释了算法的内在逻辑。
- 从完整树 \(T_0\) 开始:我们有一棵生长到最大的树。
- 寻找“最弱的一环”:在树 \(T_0\) 中,我们考察每一个非叶子节点。如果我们将某个内部节点 \(t\) 下方的整个子树剪掉,使其自身成为一个叶子节点,会发生什么?
- 误差会增加:因为这个新叶子节点的预测值(均值)肯定不如原来那片精细的子树预测得准。我们记误差增加量为 \(\Delta R\)。
- 复杂度会减小:原来的子树有很多叶子,现在变成了一个。我们记叶子节点减少量为 \(\Delta |T|\)。
-
计算“性价比”:我们可以为每个潜在的剪枝点(即每个内部节点)计算一个“性价比”指标 \(g(t)\):
\[ g(t) = \frac{R(t) - R(T_t)}{|T_t| - 1} = \frac{\Delta R}{\Delta |T|} \]- \(R(t)\) 是将节点 \(t\) 剪成叶子后的误差。
- \(R(T_t)\) 是未剪枝前,节点 \(t\) 下方整个子树 \(T_t\) 的总误差。
- \(|T_t|\) 是子树 \(T_t\) 的叶子数。
- 这个 \(g(t)\) 的含义是:剪掉这个子树,我们每减少一个叶子节点,会换来多大的误差增幅。
-
剪掉最弱的:\(g(t)\) 值最小的那个节点,就是“最弱的一环”。因为剪掉它“最划算”——用最小的误差代价,换来了复杂度的降低。
- 迭代过程:算法会找到 \(g(t)\) 最小的那个节点,并将其剪枝,得到一棵更小的树 \(T_1\)。然后,在这个 \(T_1\) 上重复上述过程,找到下一个“最弱环节”并剪掉,得到 \(T_2\)……如此往复,直到最后只剩下根节点。
这个过程就产生了一个子树序列 \([T_0, T_1, T_2, ..., T_{root}]\)。可以证明,这个序列中的每一棵树 \(T_k\),都是在某个特定的 \(\alpha_k\) 值下的最优子树。
3. 与其他剪枝策略的区别⚓︎
| 对比维度 | 代价复杂度剪枝 (CCP) | 预剪枝 (Pre-pruning) | 简单后剪枝 (Simple Post-pruning) |
|---|---|---|---|
| 执行时机 | 后剪枝:在树完全生成后进行。 | 预剪枝:在树的生长过程中进行。 | 后剪枝:在树完全生成后进行。 |
| 决策依据 | 全局的代价复杂度函数 \(R_{\alpha}(T)\)。通过一个超参数 \(\alpha\) 平衡误差与复杂度。 | 固定的、启发式的阈值,如 max_depth, min_samples_leaf, min_impurity_decrease。 |
独立的验证集。比较剪枝前后的验证集精度。 |
| 过程与结果 | 系统性地生成一个最优子树序列,然后通过交叉验证选择最佳的 \(\alpha\) 对应的树。 | 一次性生成一棵最终的树。过程简单直接。 | 自底向上,贪心地逐个节点判断是否剪枝。最终也只生成一棵树。 |
| 优点 | 1. 更鲁棒,不易错过好的子树。 2. 通过交叉验证选择 \(\alpha\),模型选择更可靠。 3. 结果是一个优化问题的解,更具理论依据。 |
1. 速度快,因为树从未完全生长。 2. 算法简单,易于实现。 |
比预剪枝视野更广,因为看到了完整的树。 |
| 缺点 | 计算量比预剪枝大。 | 1. 贪心本质,可能过早停止生长,导致欠拟合。 2. 阈值是超参数,选择困难。 |
也可能因贪心而陷入局部最优,剪掉不该剪的节点。 |
总结一下:
-
分类树的目标:最大化纯度。它使用的分裂标准是基尼不纯度 (Gini Impurity) 或 信息增益 (Information Gain),目标是让分裂后的子节点中类别尽可能单一。
-
回归树的目标:最小化预测误差。它没有“纯度”的概念,因为目标值是连续的。它衡量一次分裂好坏的标准是:分裂后的两个子区域内,样本的方差或均方误差 (Mean Squared Error, MSE) 是否足够小。
复盘流程⚓︎
假设我们要在某个节点上进行分裂,算法会执行以下操作:
- 遍历每一个特征 \(j\)。
- 对于选定的特征 \(j\),遍历该特征所有可能的取值 \(s\) 作为切分点(对于连续特征,通常是两个相邻取值的中点)。
- 每一次尝试(即选择一个特征 \(j\) 和一个切分点 \(s\))都会将当前节点的数据集 \(D\) 分成两个子集:
- \(D_1 = \{(x, y) | x_j \le s\}\)
- \(D_2 = \{(x, y) | x_j > s\}\)
-
计算分裂后的误差。最常用的误差度量是平方误差和 (Sum of Squared Errors, SSE)。
- 首先,计算出两个子集的预测值(即各自样本的均值):\(c_1 = \text{mean}(y_i | x_i \in D_1)\) 和 \(c_2 = \text{mean}(y_i | x_i \in D_2)\)。
-
然后,计算这两个子集内的总平方误差和:
\[ \text{SSE}(j, s) = \sum_{x_i \in D_1} (y_i - c_1)^2 + \sum_{x_i \in D_2} (y_i - c_2)^2 \]
-
选择最优分裂:算法会选择那个能使分裂后总 SSE 最小化的特征 \(j^*\) 和切分点 \(s^*\)。
\[ (j^*, s^*) = \arg\min_{j,s} \left[ \text{SSE}(j, s) \right] \]
这个过程会递归地在每个新生成的子节点上进行,直到满足停止条件(如达到最大深度、节点样本数过少等)。
复盘一下复杂度⚓︎
-
构建整棵树:
- 这个寻找最佳分裂点的过程会在树的每一层、每个节点上重复进行。
- 总的训练复杂度与分类树处于同一数量级,粗略估计为 \(O(\text{depth} \times m \times n \log n)\),其中 \(n\) 是总样本数。
-
预测复杂度:
- 与分类树完全相同。对于一个新样本,只需要从根节点开始,沿着树的分支向下走,直到到达一个叶子节点。其复杂度只与树的深度有关,即 \(O(\text{depth})\)。对于一棵平衡树,深度约为 \(O(\log n)\)。
这是一个简单的对比表格:
| 对比维度 | 分类树 (Classification Tree) | 回归树 (Regression Tree) |
|---|---|---|
| 解决问题 | 预测离散的类别标签 | 预测连续的数值 |
| 核心分裂标准 | 信息增益 或 基尼不纯度 (目标:使节点纯度最高) |
平方误差和 (SSE) 或 均方误差 (MSE) (目标:使节点内方差最小) |
| 叶节点输出 | 落在该叶节点样本的众数 (Mode) | 落在该叶节点样本的均值 (Mean) |
| 模型评估 | 准确率、精确率、召回率、F1 等 | 均方误差(MSE)、均方根误差(RMSE)、平均绝对误差(MAE)等 |
| 算法复杂度 | 基本相同 | 基本相同 |