离散优化:线性规划基础与进阶⚓︎
约 2847 个字 7 张图片 预计阅读时间 9 分钟 总阅读量 次
1. 线性规划问题⚓︎
1.1 问题定义与矩阵形式⚓︎
线性规划(LP)问题旨在最小化(或最大化)一个线性目标函数,同时满足一组线性约束。
矩阵形式(Standard Matrix Form):
\[
\begin{array}{l}
\min \quad z = c x \\
\text{s.t.} \quad A x \geq b \\
\quad\quad x \geq 0
\end{array}
\]
关键术语(Key Terminology):
- \(A \in \mathbb{R}^{m \times n}\):约束矩阵(constraint matrix)
- \(b \in \mathbb{R}^m\):右端向量(right-hand side vector)
- \(c \in \mathbb{R}^n\):成本向量(cost vector)
- 可行解(Feasible solution):满足 \(x \geq 0\) 且 \(Ax \geq b\) 的向量 \(x\)
- 可行域(Feasible region):所有可行解的集合
- 最优解(Optimal solution):满足 \(cx^* \leq cx\) 对所有可行解 \(x\) 都成立的 \(x^*\)
- 最优成本(Optimal cost):\(cx^*\)
1.2 标准形式与规范形式⚓︎
LP问题可表达为三种等价形式:
| 形式 | 数学表达 | 说明 |
|---|---|---|
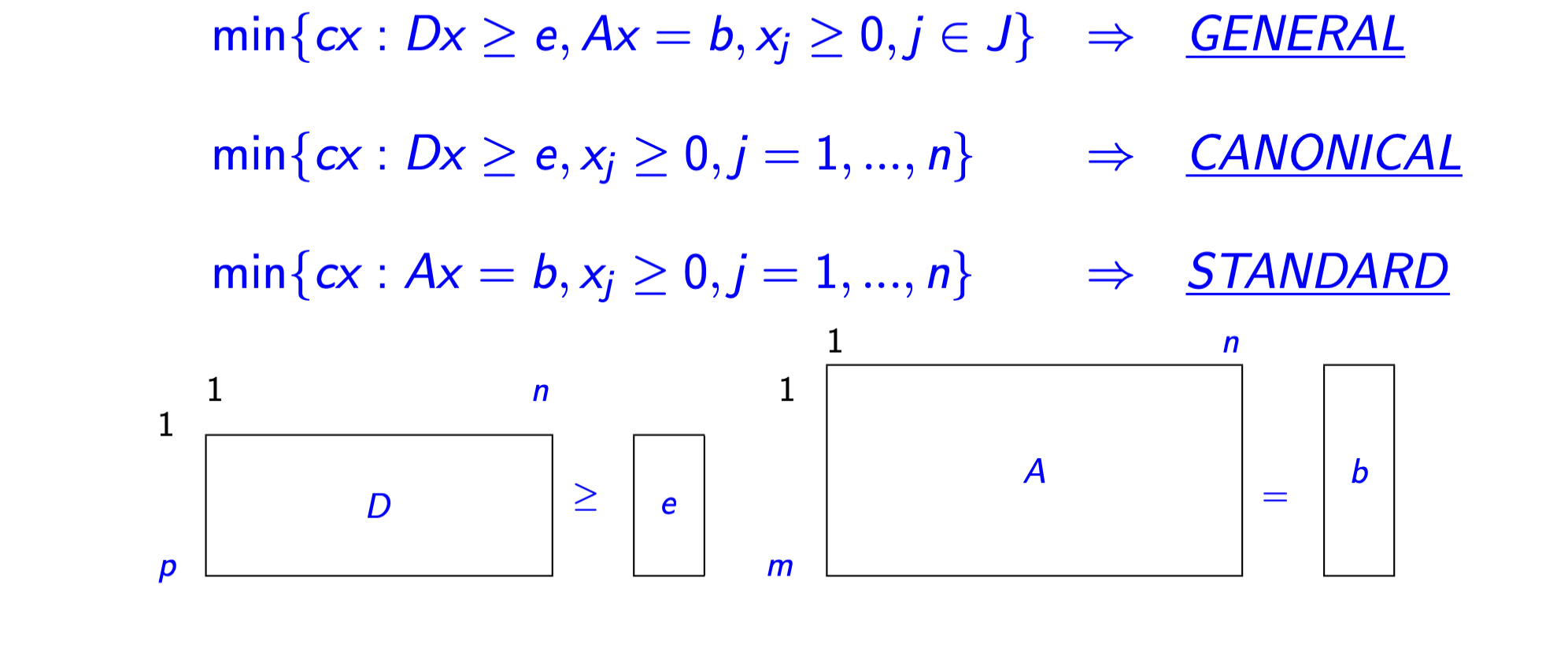
| 一般形式(General) | \(\min \{c x: D x \geq e, A x = b, x_j \geq 0, j \in J\}\) | 混合约束 |
| 规范形式(Canonical) | \(\min \{c x: D x \geq e, x_j \geq 0, j = 1, \dots, n\}\) | 仅不等式约束 |
| 标准形式(Standard) | \(\min \{c x: A x = b, x_j \geq 0, j = 1, \dots, n\}\) | 等式约束,非负变量 |
2. 几何视角下的LP求解(Geometric Solution)⚓︎
2.1 可行域的几何特征⚓︎
- 半空间(Halfspace):每个约束定义的区域,包含所有满足该约束的 \(x \in \mathbb{R}^n\)
- 可行域(Feasible region):所有半空间的交集
- 角点(Corner points):与约束方程关联的顶点
示意图见 2.2 的图。
2.2 等利润线与最优解⚓︎
- 等利润线(Isoprofit line):满足 \(cx = z\) 的点集,形成一条直线,垂直于梯度向量 \(c\)
- \(z\) 的值沿 \(c\) 方向增加
- 关键结论:最优解必定位于可行域的某个角点(corner point)上
- 通过沿 \(c\) 方向尽可能移动等利润线,同时保持与可行域接触,直至达到最远角点
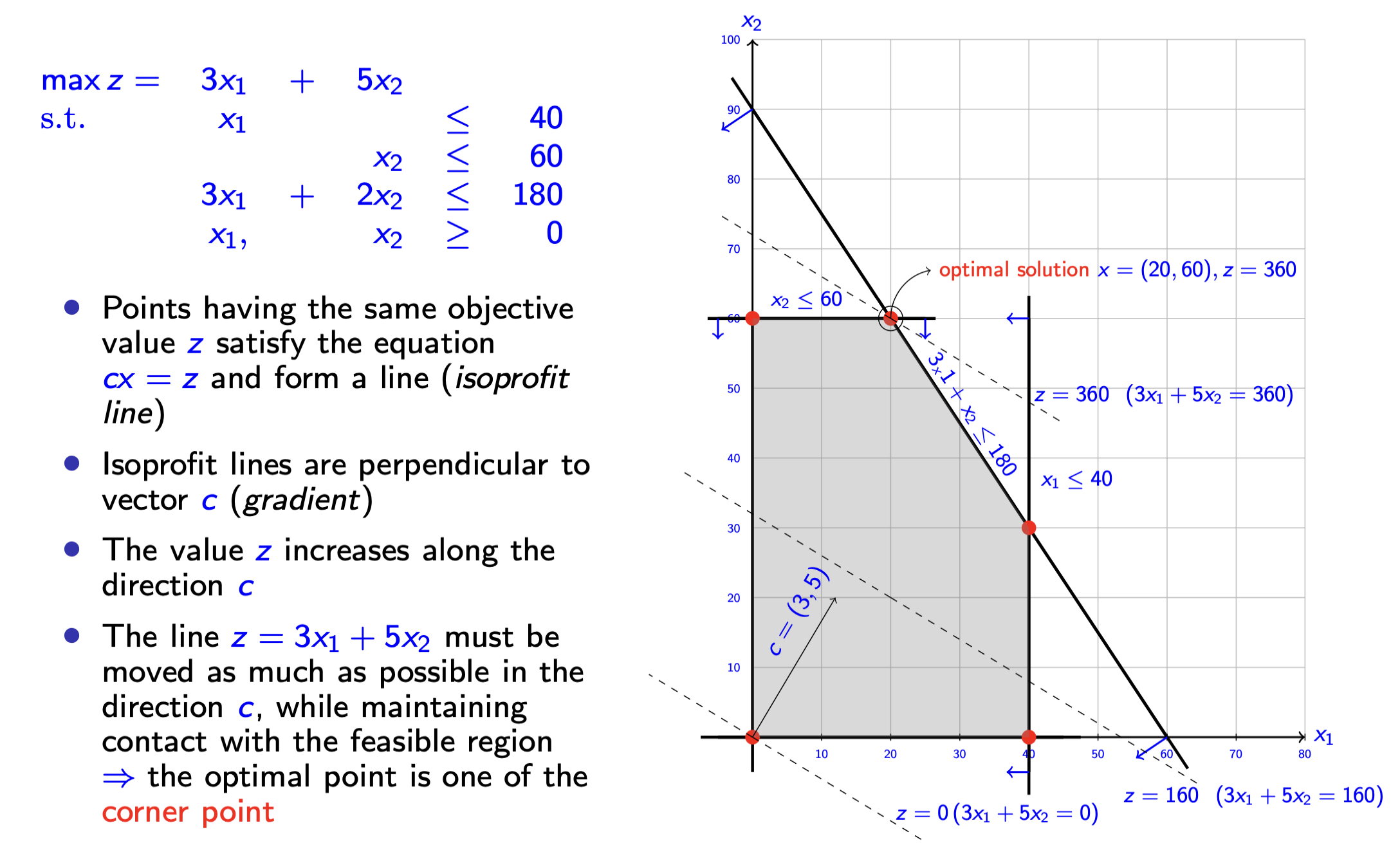
- 展示从 \(z=0\) 到最优解 \(z=360\) 的等利润线移动过程
2.3 解的可能情况⚓︎
求解LP问题时可能出现的四种情况:
- 唯一最优解(Unique optimal solution):发生在极点(extreme point)
- 多重最优解(Alternative optimal solutions):目标函数与某条边界平行
- 无界最优值(Unbounded optimal objective value):可行域无界且目标函数可无限优化
- 空可行域(Empty feasible region):约束相互矛盾
3. 线性代数基础(Linear Algebra)⚓︎
3.1 向量空间与矩阵⚓︎
- \(n\)维欧几里得空间(\(n\)-dimensional Euclidean space):记作 \(\mathbb{R}^n\),所有 \(n\) 维向量的集合
- 线性组合(Linear combination):\(y = \sum_{j=1}^{k} \lambda_i x^i\),其中 \(\lambda_i \in \mathbb{R}\)
- 子空间(Subspace):若 \(x^1, x^2 \in S\),则它们的任意线性组合也属于 \(S\)
- 线性无关(Linearly independent):\(\sum_{i=1}^{k} \lambda_i x^i = 0\) 的唯一解是 \(\lambda_i = 0\)
- 张成(Span):若 \(\mathbb{R}^n\) 中任意向量都可表示为 \(x^1, \dots, x^k\) 的线性组合,则称这些向量张成 \(\mathbb{R}^n\)
- 基(Basis):张成 \(\mathbb{R}^n\) 的线性无关向量组
3.2 矩阵的秩与线性方程组⚓︎
对于 \(m \times n\) 矩阵 \(A\):
- 行秩(Row rank):\(A\) 中线性无关行的最大数量
- 列秩(Column rank):\(A\) 中线性无关列的最大数量
- 秩(Rank):\(\operatorname{rank}(A) =\) 行秩 \(=\) 列秩 \(\leq \min\{n, m\}\)
- 满秩(Full rank):若 \(\operatorname{rank}(A) = \min\{n, m\}\)
- 逆矩阵(Inverse):若 \(B\) 满足 \(AB = I\) 且 \(BA = I\),则 \(B\) 是 \(A\) 的逆(\(A\) 非奇异/nonsingular)
- 奇异矩阵(Singular):没有逆矩阵的方阵(行/列线性相关)
线性方程组 \(Ax = b\) 的解:
- 增广矩阵 \((A, b)\) 的秩 \(>\) \(\operatorname{rank}(A)\):无解
- \(\operatorname{Rank}(A, b) = \operatorname{rank}(A) = k = n\):唯一解
- \(\operatorname{Rank}(A, b) = \operatorname{rank}(A) = k < n\):无穷多解
4. 线性规划的几何理论(The Geometry of LP)⚓︎
4.1 凸集与多面体⚓︎
- 凸集(Convex set):集合 \(X\) 中任意两点 \(x^1, x^2\) 的凸组合 \(\lambda x^1 + (1-\lambda)x^2\)(\(\lambda \in [0,1]\))仍在 \(X\) 中
- 严格凸组合(Strict convex combination):\(\lambda \in (0,1)\)
- 极点(Extreme point):不能表示为 \(X\) 中两个不同点的严格凸组合的点
- 超平面(Hyperplane):\(H = \{x : px = k\}\),其中 \(p \neq 0\)
- 半空间(Half-space):\(\{x : px \geq k\}\)
多面体(Polyhedron):
- 有限个半空间的交集,是凸集(Proposition 1)
- \(P = \{x \in \mathbb{R}^n : Ax \leq b\}\)
- 多胞体(Polytope):有界的多面体,存在 \(w \in \mathbb{R}_+^1\) 使得 \(P \subseteq \{x : -w \leq x_j \leq w\}\)
锥(Cone):
- \(C \subseteq \mathbb{R}^n\) 是锥如果 \(x \in C \Rightarrow \lambda x \in C\) 对所有 \(\lambda \in \mathbb{R}^1\) 成立
- Proposition 2:多面体 \(\{x \in \mathbb{R}^n : Ax \leq 0\}\) 是一个锥
4.2 方向与极方向⚓︎
- 方向(Direction):非零向量 \(d\),使得从集合中任一点 \(x^0\) 出发,沿 \(d\) 方向无限延伸 \(\{x^0 + \lambda d : \lambda \geq 0\}\) 仍在集合内
- 极方向(Extreme direction):不能表示为两个不同方向的正组合的方向
- 有界集合没有方向
4.3 表示定理(Representation Theorem)⚓︎
Theorem 1:设 \(X = \{x : Ax \leq b, x \geq 0\}\) 是非空多面体集。
- 极点集:非空且有限,记为 \(x^1, x^2, \ldots, x^k\)
- 极方向集:\(X\) 有界时为空;无界时非空且有限,记为 \(d^1, d^2, \ldots, d^l\)
- 表示:\(\bar{x} \in X\) 当且仅当可表示为:
\[
\begin{array}{l}
x = \sum_{j=1}^{k} \lambda_{j} x^{j} + \sum_{j=1}^{l} \mu_{j} d^{j} \\
\sum_{j=1}^{k} \lambda_{j} = 1, \quad \lambda_{j} \geq 0, \quad \mu_{j} \geq 0
\end{array}
\]
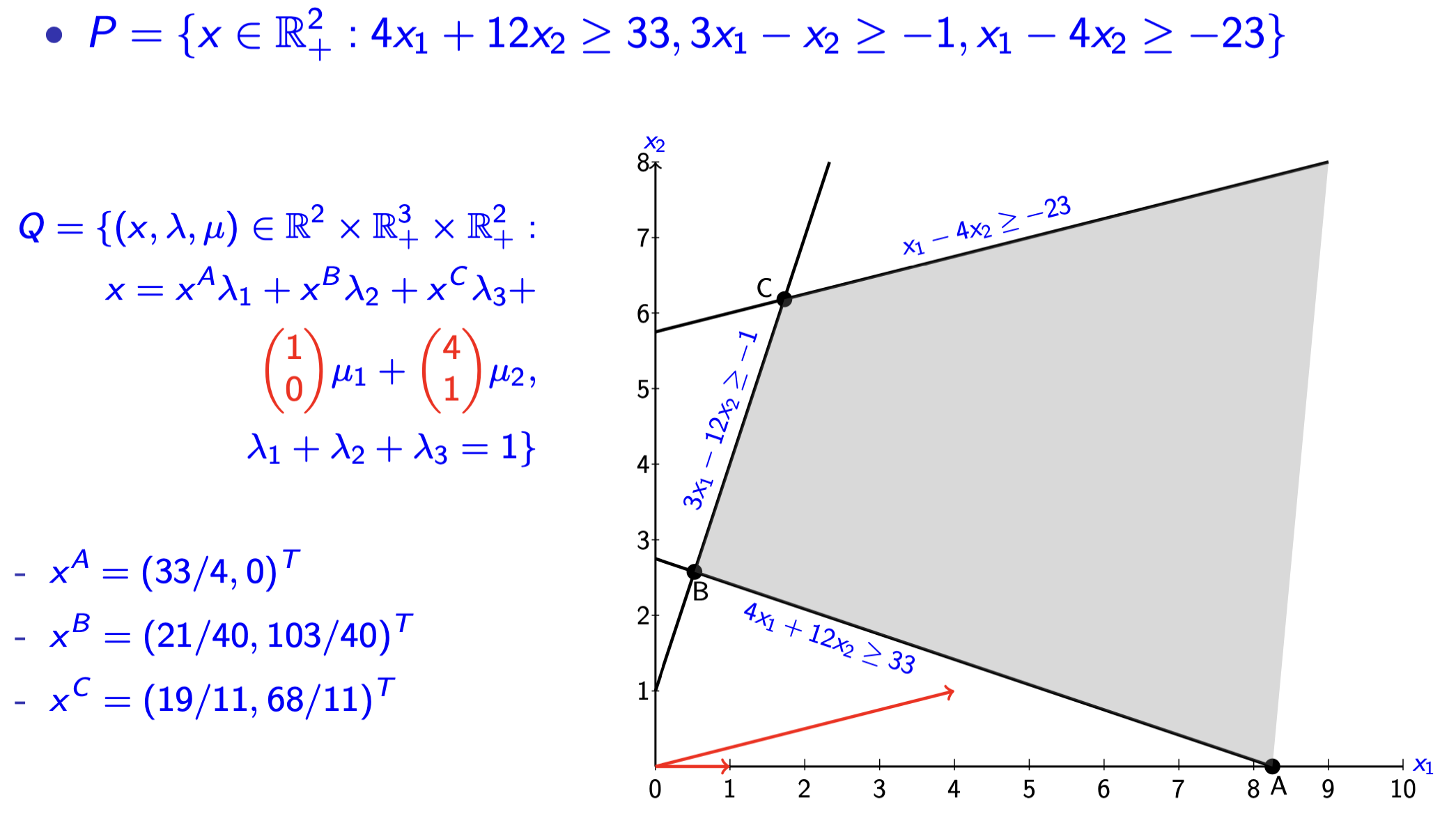
展示二维空间中点表示为极点凸组合加极方向线性组合
4.4 极点的代数刻画:基本可行解⚓︎
考虑标准形式 \(\min \{cx : Ax = b, x \geq 0\}\),其中 \(m \leq n\),\(\operatorname{rank}(A) = m\)。
- 基(Basis):\(A\) 中 \(m\) 个线性无关列的集合 \(B\)
- 基矩阵(Basis Matrix):\(B\)(\(m \times m\) 可逆子矩阵)
- 基变量(Basic variables):\(x^B\)(与 \(B\) 关联的变量)
- 非基变量(Non-basic variables):\(x^F\)(其余变量,设为0)
基本解(Basic solution):
\[
x^B = B^{-1}b - B^{-1}Fx^F = B^{-1}b \quad (\text{当 } x^F = 0)
\]
- 基本可行解(Basic feasible solution):若 \(x^B = B^{-1}b \geq 0\)
- 退化(Degenerate):若 \(x^B\) 有一个或多个分量为0,此时一个极点可能对应多个不同的基
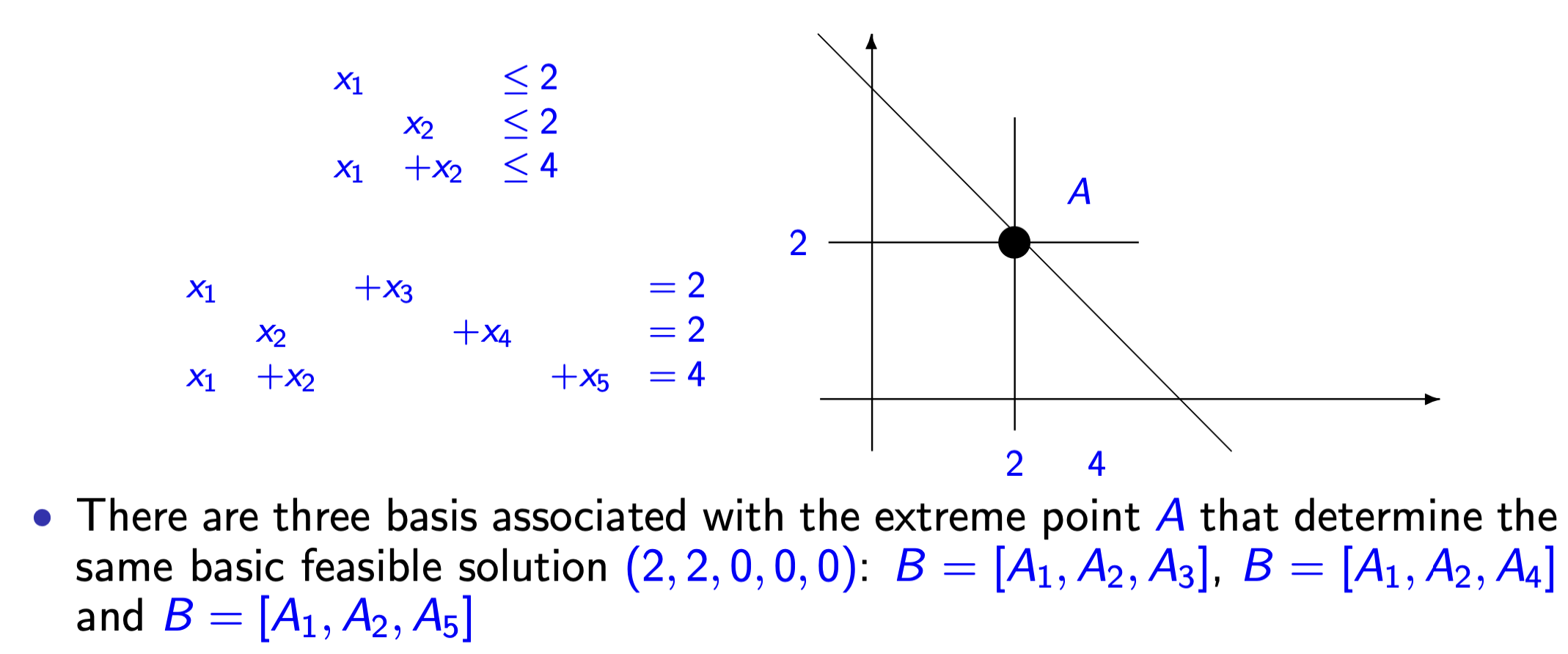
在点 \((2,2)\) 处三条约束相交,导致同一极点对应三个不同基。这个案例中出现这个情况是因为第三条约束实际上是无效的(因为前两个约束已经保证了这一点)。
4.5 极点与基本可行解的对应关系⚓︎
Theorem 4:极点集合与基本可行解集合一一对应(均非空当且仅当可行域非空)。
Theorem 5:
- 每个极点到少对应一个基,每个基对应唯一一个极点
- 若一个极点对应多个基,则该极点是退化的(反之不必然)
关键结论:寻找最优解只需检查基本可行解(极点),其数量不超过 \(\binom{n}{m}\)。
5. 单纯形法(The Simplex Method)⚓︎
5.1 简约成本(Reduced Cost)与最优性条件⚓︎
将 \(A\) 分为基矩阵 \(B\) 和非基矩阵 \(F\),相应 \(c = [c^B, c^F]\),\(x = [x^B, x^F]\)。
约束表达式:
\[
B x^B + F x^F = b \Rightarrow x^B = B^{-1}b - B^{-1}Fx^F
\]
目标函数重写:
\[
cx = c^B B^{-1}b + (c^F - c^B B^{-1}F)x^F = c^B B^{-1}b + \bar{c}^F x^F
\]
简约成本向量(Reduced cost vector):
\[
\bar{c} = c - c^B B^{-1}A = \begin{bmatrix} \bar{c}^B \\ \bar{c}^F \end{bmatrix}, \quad \text{其中 } \bar{c}^B = 0
\]
Theorem 6(最优性条件):若 \(\bar{c} \geq 0\),则当前基本可行解是最优解。
证明概要:对任意可行解 \(x\),\(cx = c^B B^{-1}b + \bar{c}^F x^F \geq c^B B^{-1}b\)(因 \(\bar{c}^F \geq 0, x^F \geq 0\))。
5.2 基变换(Pivoting)与最小比值规则⚓︎
若存在非基变量 \(x_h\) 使 \(\bar{c}_h < 0\),则可改进当前解:
入基变量(Entering variable):选择 \(\bar{c}_h < 0\) 的 \(x_h\)(通常选最负者,Dantzig规则)
约束变化:
\[
x_{[i]} = \bar{b}_i - \bar{a}_{ih}x_h \geq 0 \quad (i=1,\dots,m)
\]
最小比值规则(Minimum Ratio Rule):
\[
x_h = \vartheta = \min \left\{ \frac{\bar{b}_i}{\bar{a}_{ih}} : \bar{a}_{ih} > 0, i = 1, \dots, m \right\}
\]
- 若 \(\bar{a}_{ih} \leq 0\) 对所有 \(i\),则 \(x_h\) 可无限增大,目标函数无界 \(\Rightarrow\) 问题无界(Unbounded)
- 若 \(\bar{a}_{ih} > 0\),则 \(x_h\) 增大时基变量 \(x_{[i]}\) 减小
出基变量(Leaving variable):达到最小比值的行 \(r\) 对应的基变量 \(x_{[r]}\) 离开基,设为零。
转轴(Pivot):\(x_h\) 入基(取正值 \(\vartheta\)),\(x_{[r]}\) 出基(置零),得到新的基本可行解。
相邻基本可行解(Adjacent basic feasible solutions):两解的基变量集合有 \(m-1\) 个相同变量。
5.3 单纯形算法流程⚓︎
计算基本可行解 x;B = [A_{[1]},...,A_{[m]}] 为关联基
设置 unbounded := FALSE; optimal := FALSE;
while (optimal = FALSE and unbounded = FALSE) do
计算 B^{-1},令 u := c^B B^{-1};
计算简约成本 \bar{c}_h = c_h - uA_h,对所有非基变量 x_h
if (\bar{c}_h >= 0 对所有非基变量 x_h) then
optimal := TRUE
else
选择非基变量 x_h 使得 \bar{c}_h < 0;
计算 \bar{b} := B^{-1}b 和 \bar{A}_h := B^{-1}A_h;
if (\bar{a}_{ih} <= 0, i=1,...,m) then
unbounded := TRUE
else
计算 t := argmin { \bar{b}_i / \bar{a}_{ih} : i=1,...,m 且 \bar{a}_{ih} > 0 };
更新基 [t] := h; (转轴操作)
endif
endif
endwhile
转轴规则(Pivot Rules):
- Dantzig规则:选择目标函数行中成本系数最大的负值(即最负的 \(\bar{c}_h\))
- First eligible:选择第一个符合条件的非基变量
- Hybrid规则:在前 \(K\) 个检查变量中选择成本系数最负者
收敛性:无退化时,目标函数严格递减,算法在有限步内终止(因基本可行解数量有限)。
5.4 单纯形表格式(Tableau Format)⚓︎
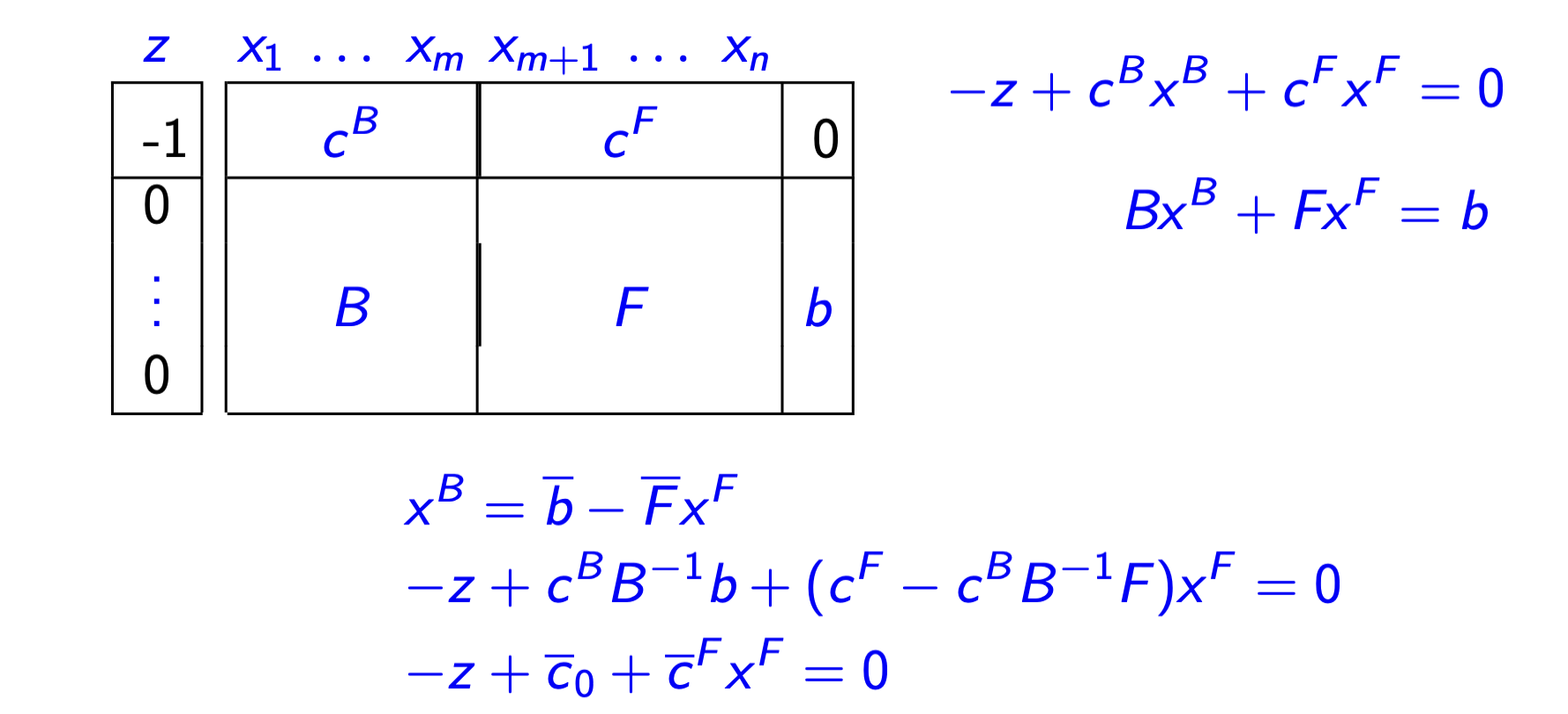
表的结构:
- 基变量 \(x^B = \bar{b} - \bar{F}x^F\)
- 目标函数行:\(-z + \bar{c}_0 + \bar{c}^F x^F = 0\),其中 \(\bar{c}_0 = c^B B^{-1}b\)
转轴操作(Pivot Operation):
\[
\begin{array}{l}
x_h = \frac{\bar{b}_t}{\bar{a}_{th}} - \sum_{j \neq h} \frac{\bar{a}_{tj}}{\bar{a}_{th}} x_j - \frac{1}{\bar{a}_{th}} x_{[t]} \\
x_{[i]} = \left(\bar{b}_i - \frac{\bar{a}_{ih}}{\bar{a}_{th}}\bar{b}_t\right) - \sum_{j \neq h} \left(\bar{a}_{ij} - \frac{\bar{a}_{ih}}{\bar{a}_{th}}\bar{a}_{tj}\right) x_j + \frac{\bar{a}_{ih}}{\bar{a}_{th}} x_{[t]}
\end{array}
\]
6. 线性规划中的对偶性(Duality in LP)⚓︎
6.1 对偶问题的构造⚓︎
原问题(Primal):
\[
\min \{cx : Ax = b, x \geq 0\}
\]
对偶问题(Dual):
\[
\max \{ub : uA \leq c\}
\]
其中 \(u \in \mathbb{R}^m\) 为对偶变量向量。
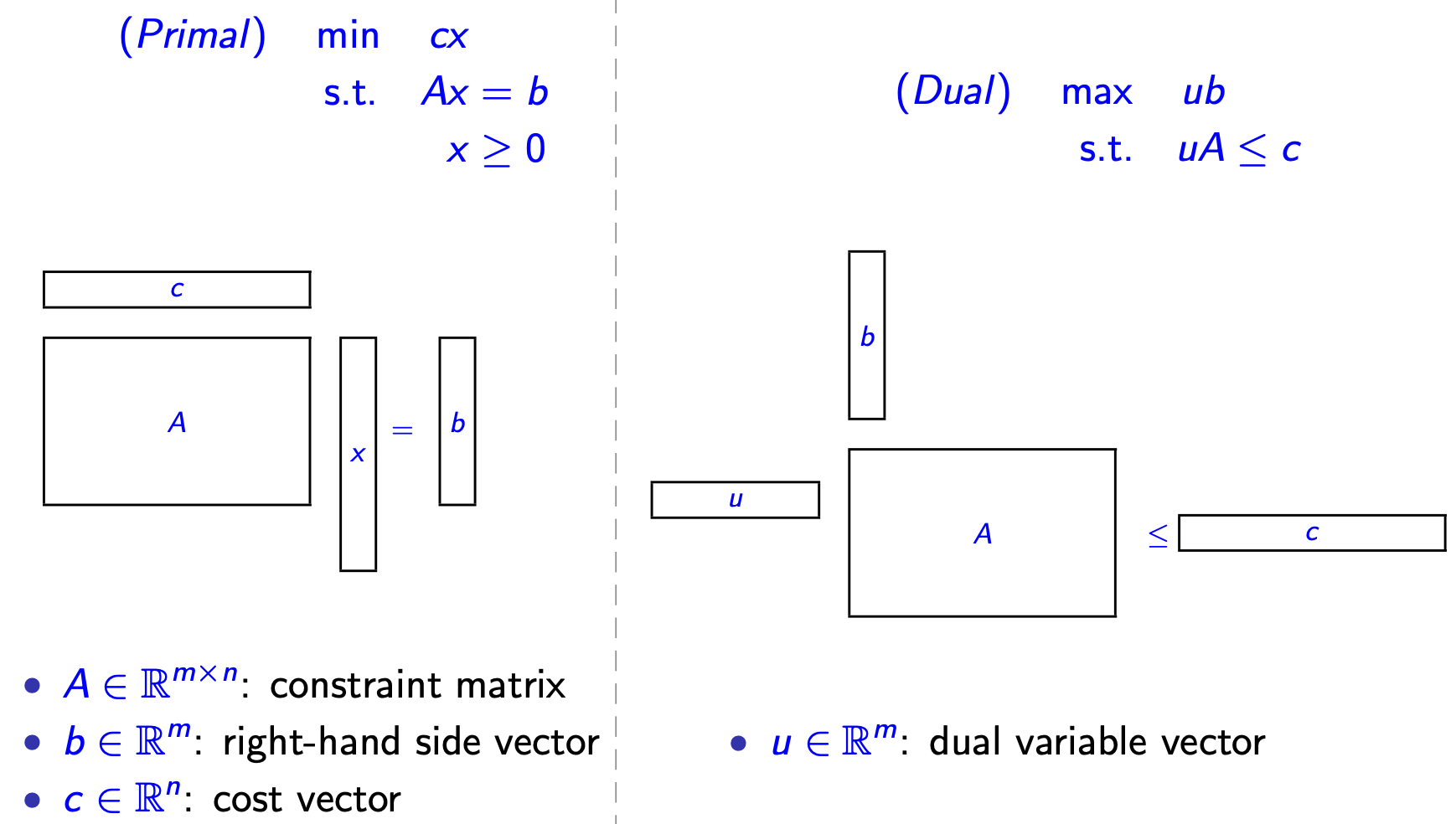
- 展示原问题(列向量 \(x\),等式约束)与对偶问题(行向量 \(u\),不等式约束 \(\leq\))的结构对比
对偶关系表:
| 原问题(min) | 对偶问题(max) |
|---|---|
| \(a_i x \geq b_i\) | \(u_i \geq 0\) |
| \(a_i x \leq b_i\) | \(u_i \leq 0\) |
| \(a_i x = b_i\) | \(u_i\) 自由(free) |
| \(x_j \geq 0\) | \(uA_j \leq c_j\) |
| \(x_j \leq 0\) | \(uA_j \geq c_j\) |
| \(x_j\) 自由 | \(uA_j = c_j\) |
6.2 Farkas引理与对偶理论⚓︎
有效不等式(Valid inequality):不等式 \(cx \geq c_0\) 对集合 \(X\) 有效,若对所有 \(x \in X\) 成立。
Theorem 7(Farkas引理):不等式 \(c_0 \leq cx\) 对非空多面体 \(P = \{Ax = b, x \geq 0\}\) 有效,当且仅当存在 \(u \in \mathbb{R}^m\) 使得:
\[
c \geq uA \quad \text{(I)} \quad \text{且} \quad c_0 \leq ub \quad \text{(II)}
\]
推导对偶:
\[
\min_{x \in P} cx = \max_{c_0 \leq cx, \forall x \in P} c_0 = \max_{uA \leq c} ub
\]
6.3 弱对偶性与强对偶性⚓︎
Lemma 1(弱对偶性 / Weak Duality): 若 \(\tilde{x} \geq 0\) 是原问题可行解,\(\tilde{u}\) 是对偶问题可行解,则:
\[
c\tilde{x} \geq \tilde{u}b
\]
证明:\(A\tilde{x} = b \Rightarrow \tilde{u}A\tilde{x} = \tilde{u}b\),由 \(c \geq \tilde{u}A\) 得 \(c\tilde{x} \geq \tilde{u}A\tilde{x} = \tilde{u}b\)。
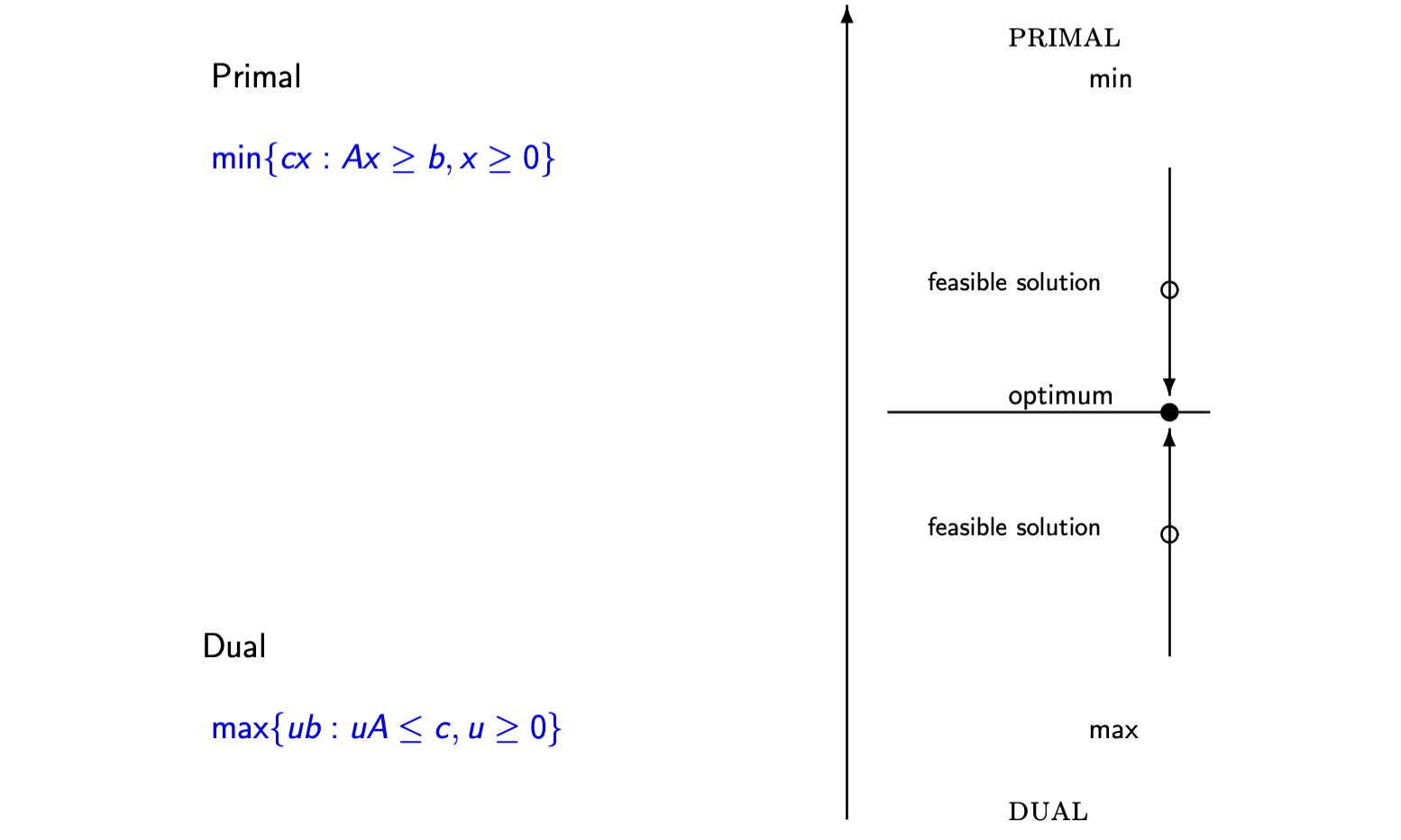
- 展示原问题(min)目标值在下,对偶问题(max)目标值在上,最优值在中间相遇
Corollary 1:
- 原问题和对偶问题都有有限最优解
- 原问题无界 \(\Rightarrow\) 对偶问题无可行解
- 对偶问题无界 \(\Rightarrow\) 原问题无可行解
- 两问题均无可行解(可能同时发生)
Lemma 2(强对偶性 / Strong Duality): 若原问题或对偶问题之一存在最优解,则两问题都存在最优解且最优目标值相等。
6.4 互补松弛性(Complementary Slackness)⚓︎
对于原问题-对偶问题对 \(\min\{cx : Ax \geq b, x \geq 0\}\) 和 \(\max\{ub : uA \leq c, u \geq 0\}\):
解 \(x\) 和 \(u\) 分别为最优解当且仅当满足:
- (a) \(Ax \geq b, x \geq 0\) (原可行性)
- (b) \(uA \leq c, u \geq 0\) (对偶可行性)
- (c) \(cx = ub\) (目标值相等)
由 (a)(b) 可得互补松弛条件:
\[
(c - uA)x = 0 \quad \text{和} \quad u(Ax - b) = 0
\]
展开为分量形式(\(A_i\) 为 \(A\) 的第 \(i\) 列,\(a^i\) 为第 \(i\) 行):
\[ (c_j - uA_j)x_j = 0 \quad (j=1,\dots,n) \\ u_i(a^i x - b_i) = 0 \quad (i=1,\dots,m) \]
经济学解释:
- 若 \(c_j - uA_j > 0\)(对偶约束不紧),则 \(x_j = 0\)(原变量为零)
- 若 \(a^i x > b_i\)(原约束不紧),则 \(u_i = 0\)(对偶变量为零)
6.5 对偶单纯形法(Dual Simplex Method)⚓︎
从对偶角度求解的替代算法:
- 出发点:满足对偶可行性 (b) 和互补松弛性 (c),但违反原问题非负约束 (a) 的基本解
- 过程:通过转轴操作保持 (b) 和 (c),逐步恢复 (a)
- 应用:灵敏度分析(Sensitivity analysis)中特别有用,可高效处理参数变化
最优性条件的完整表述:
- (a), (b):原问题与对偶可行性
- (c1) \((c - uA)x = 0\):原始互补松弛
- (c2) \(u(Ax - b) = 0\):对偶互补松弛
7. 参考文献(Bibliography)⚓︎
- Bazaraa, M. S., Jarvis, J. J., and Sherali, H. F. (2010): Linear Programming and Network Flows. John Wiley & Sons, 4th edition.
- Bertsimas, D. and Tsitsiklis, J. (1997): Introduction to Linear Optimization. Athena Scientific, 1st edition.
注:文中 Theorems 1-5 分别对应参考文献 [2] 中的 Theorems 2.1, 3.2, 3.3, 3.1, 3.4。