离散优化 Ch_05:从松弛到最优⚓︎
约 4579 个字 7 张图片 预计阅读时间 15 分钟 总阅读量 次
本章概要
详解最优性证明、松弛技术与对偶性原理,深入分支定界算法的剪枝规则与选择策略,附带背包问题和 TSP 的完整应用示例。
1. 最优性、松弛与界 (Optimality, Relaxation and Bounds)⚓︎
1.1 基础概念⚓︎
核心目标
研究如何证明可行解是最优的或接近最优的,并推导寻找最优解的算法。界(bounds)的概念在此语境下至关重要(the notion of bounds is of crucial importance)。
考虑整数规划(IP)的标准形式:
\[
(IP) \quad z(IP) = \min\{cx : x \in X\}
\]
其中 \(X = P \cap \mathbb{Z}^n\),且 \(P = \{x \in \mathbb{R}_+^n : Ax \geq a\}\)。
上下界与最优性:
- 若给定下界 \(\underline{z} \leq z(IP)\) 和上界 \(z(IP) \leq \overline{z}\),且满足 \(\overline{z} - \underline{z} \leq \epsilon\)(\(\epsilon > 0\)),则最优函数值被限制在精度 \(\epsilon\) 以内。
- 若 \(\underline{z} = \overline{z}\),则已找到最优解。
界的分类:
| 类型 | 最小化问题 | 最大化问题 | 获取方法 |
|---|---|---|---|
| 原始界(Primal bounds) | 上界 | 下界 | 启发式算法(Heuristic algorithms) |
| 对偶界(Dual bounds) | 下界 | 上界 | 通过更简单的问题获得 |
获得对偶界的两种主要方式:
- 扩大可行解集(Enlarge the set of feasible solutions),在更大的集合上优化。
- 替换目标函数(Replace the objective function),使其在原问题的定义域上具有相同或更小的值(对于最小化问题)。
1.2 松弛的定义与性质⚓︎
定义 1:松弛 (Relaxation)
给定以下两个优化问题: $$ (IP) \quad z(IP) = \min {c x : x \in X \subseteq \mathbb{R}^n} $$ $$ (RP) \quad z(RP) = \min {f(x) : x \in T \subseteq \mathbb{R}^n} $$
若满足以下条件,则问题 \(RP\) 称为 \(IP\) 的松弛(relaxation): 1. \(X \subseteq T\)(可行域包含原可行域) 2. \(f(x) \leq c x, \forall x \in X\)(在 \(X\) 上松弛目标函数值不大于原目标函数值)
命题 1:松弛的性质
设 \(RP\) 是 \(IP\) 的松弛,则以下性质成立: 1. \(z(RP) \leq z(IP)\)(松弛最优值提供下界) 2. 若 \(RP\) 不可行,则 \(IP\) 也不可行 3. 若 \(x^*\) 是 \(RP\) 的最优解,且 \(x^* \in X\) 且 \(f(x^*) = cx^*\),则 \(x^*\) 也是 \(IP\) 的最优解
整数规划中最有用的松弛类型:
| 松弛类型 | 描述 |
|---|---|
| 线性规划松弛(LP-relaxation) | \(z(LP) = \{\min cx : x \in P\}\) |
| 组合松弛(Combinatorial relaxations) | 松弛问题是组合优化问题 |
| 拉格朗日松弛(Lagrangian relaxation) | 基于约束分解(见第 6 讲) |
1.3 线性规划松弛示例:背包问题⚓︎
回顾背包问题(Knapsack Problem, KP):
\[
(KP) \quad z(KP) = \max \left\{ \sum_{j=1}^{n} p_j x_j : \sum_{j=1}^{n} w_j x_j \leq c, x_j \in \mathbb{B}, j = 1, \dots, n \right\}
\]
其 LP 松弛(将 \(x_j \in \mathbb{B}\) 替换为 \(0 \leq x_j \leq 1\))无需使用标准线性规划方法求解,可通过贪心算法(greedy algorithm)高效解决:
背包问题 LP 松弛的贪心算法
- 排序:按价值重量比(\(p_i/w_i\) ratios)非递增排序物品。
- 假设:\(p_1/w_1 \geq p_2/w_2 \geq \dots \geq p_n/w_n\)。
- 临界点:令 \(s\) 为满足 \(\sum_{j=1}^{s} w_j \leq c\) 的最大索引。
- 装入前 s 个:完全装入物品 \(1, \ldots, s\)(即 \(x_j = 1, j = 1, \ldots, s\))。
- 装入部分 s+1:用剩余空间 \(\overline{c} = c - \sum_{j=1}^{s} w_j\) 装入物品 \(s+1\) 的 \(\overline{c}/w_{s+1}\) 单位(即 \(x_{s+1} = \overline{c}/w_{s+1}\))。
- 其余不装:设置 \(x_j = 0, j = s + 2, \ldots, n\)。
1.4 组合松弛示例:旅行商问题(TSP)⚓︎
回顾旅行商问题(Traveling Salesman Problem)的原始形式:
\[
\begin{array}{l}
(TSP) \quad \min \sum_{e \in E} c_e x_e \\
\text{s.t.} \quad \sum_{e \in \delta(\{h\})} x_e = 2, \quad \forall h \in V \quad (2) \\
\quad \quad \sum_{e \in \delta(S)} x_e \geq 2, \quad \forall S \subset V, |S| > 2 \quad (3) \\
\quad \quad x_e \in \{0, 1\}, \quad \forall e \in E
\end{array}
\]
松弛构造:
- 将约束 (3) 的右端项从 2减少到 1。
- 对所有方程 (2) 求和并除以 2。
- 考虑约束 (2) 中的第一个方程(例如 \(h=1\))。
得到的整数规划是最小成本 1-树问题(minimum cost 1-tree problem):
\[
\min \sum_{e \in E} c_e x_e
\]
约束:
\[
\begin{array}{l}
\sum_{e \in \delta(\{h\})} x_e = 2, \quad h = 1 \\
\frac{1}{2} \sum_{h \in V} \sum_{e \in \delta(\{h\})} x_e = n \\
\sum_{e \in \delta(S)} x_e \geq 1, \quad \forall S \subset V, |S| > 2 \\
x_e \in \{0, 1\}, \quad \forall e \in E
\end{array}
\]
该问题可分解为两个独立的子问题高效求解(可在多项式时间内求解,can be solved in polynomial time):
- 在 \(V \setminus \{1\}\) 中寻找最小成本生成树(minimum cost spanning tree)。
- 寻找与图 \(G\) 中顶点 1 关联的两条最小成本边(two smallest cost edges)。
关键洞见:对偶性消除了松弛的缺陷:任意对偶可行解均可给出下界,而非仅松弛问题的最优解。
2. 线性规划中的对偶性 (Duality in Linear Programming)⚓︎
2.1 原问题与对偶问题⚓︎
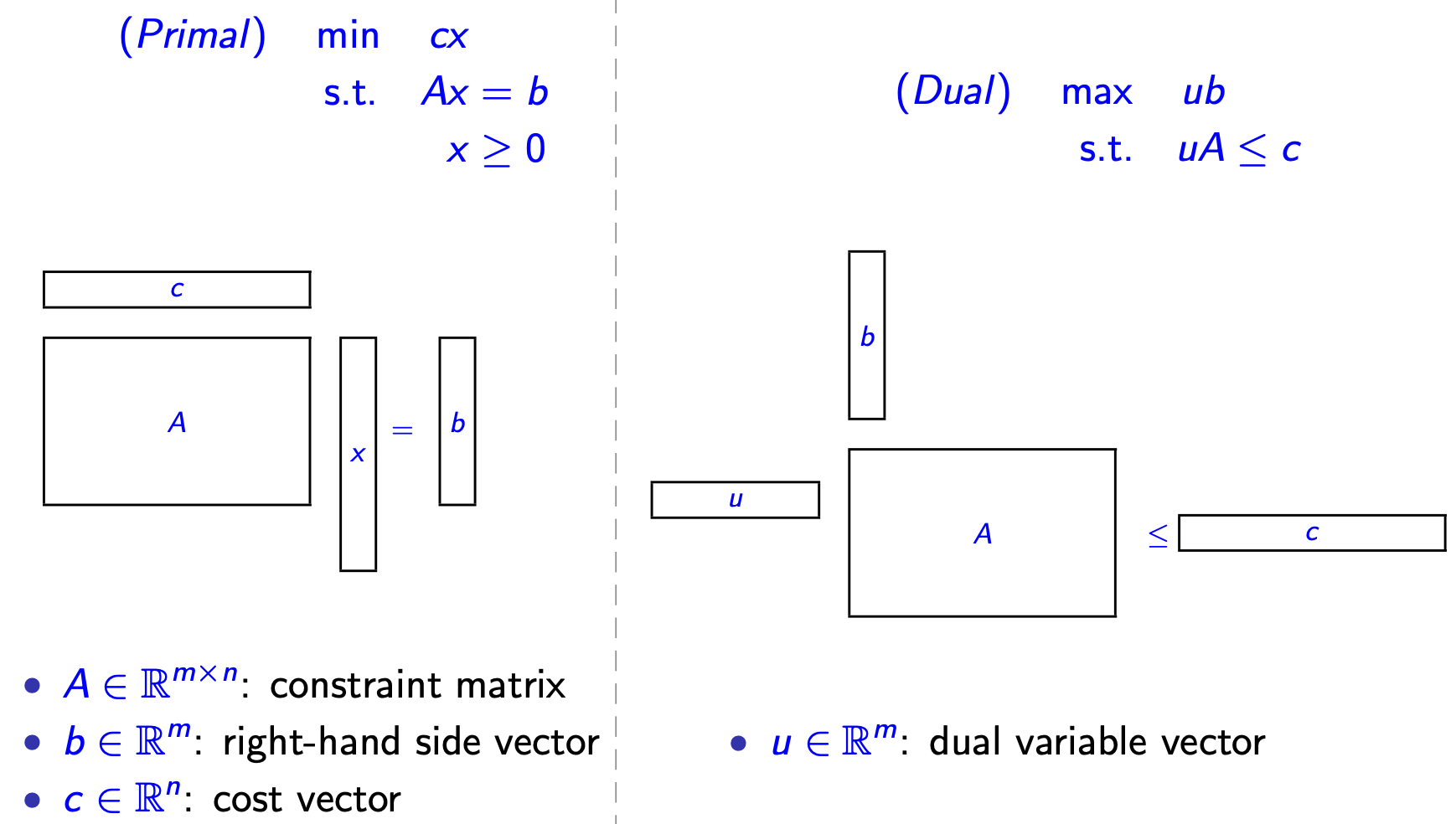
原问题(Primal):
\[
\begin{aligned}
\min \quad & cx \\
\text{s.t.} \quad & Ax = b \\
& x \geq 0
\end{aligned}
\]
对偶问题(Dual):
\[
\begin{aligned}
\max \quad & ub \\
\text{s.t.} \quad & uA \leq c
\end{aligned}
\]
其中:
| 符号 | 含义 |
|---|---|
| \(A \in \mathbb{R}^{m \times n}\) | 约束矩阵(constraint matrix) |
| \(b \in \mathbb{R}^m\) | 右端向量(right-hand side vector) |
| \(c \in \mathbb{R}^n\) | 成本向量(cost vector) |
| \(u \in \mathbb{R}^m\) | 对偶变量向量(dual variable vector) |
对偶性的作用
对偶性提供了一种获得问题 \(IP\) 下界(lower bounds)的标准方法。使用松弛获得界的一个明显缺点是,只有松弛问题的最优解才能保证对 \(z(IP)\) 的下界;而对偶性消除了这一困难,因为对偶问题的定义使得任何对偶可行解(any dual feasible solution)都能产生对 \(z(IP)\) 的下界。
3. 整数规划中的对偶性 (Duality in Integer Programming)⚓︎
3.1 弱对偶与强对偶⚓︎
定义 2:弱对偶对 (Weak-dual pair)
以下两个问题: $$ (IP) z(IP) = \min{c(x) : x \in X} \iff (D) z(D) = \max{w(u) : u \in U} $$
若对所有 \(x \in X\) 和 \(u \in U\) 都有 \(c(x) \geq w(u)\),则它们形成弱对偶对(form a weak-dual pair)。
当 \(z(IP) = z(D)\) 时,它们形成强对偶对(form a strong-dual pair)。
命题 2
整数规划 \(z(IP) = \min\{cx : Ax \geq b, x \in \mathbb{Z}_+^n\}\) 与线性规划 \(z(D) = \max\{ub : uA \leq c, u \in \mathbb{R}_+^m\}\) 形成弱对偶对。
命题 3
设 \(IP\) 和 \(D\) 是弱对偶对: 1. 若 \(D\) 无界(unbounded),则 \(IP\) 不可行。 2. 若 \(x^* \in X\) 和 \(u^* \in U\) 满足 \(c(x^*) = w(u^*)\),则 \(x^*\) 对 \(IP\) 最优,\(u^*\) 对 \(D\) 最优。
3.2 对偶示例:匹配与节点覆盖⚓︎
匹配(Matching):
给定图 \(G = (V, E)\),匹配(matching)\(M \subseteq E\) 是一组不相交的边,即子图 \(G(M) = (V, M)\) 中每个节点至多与一条边相关联。
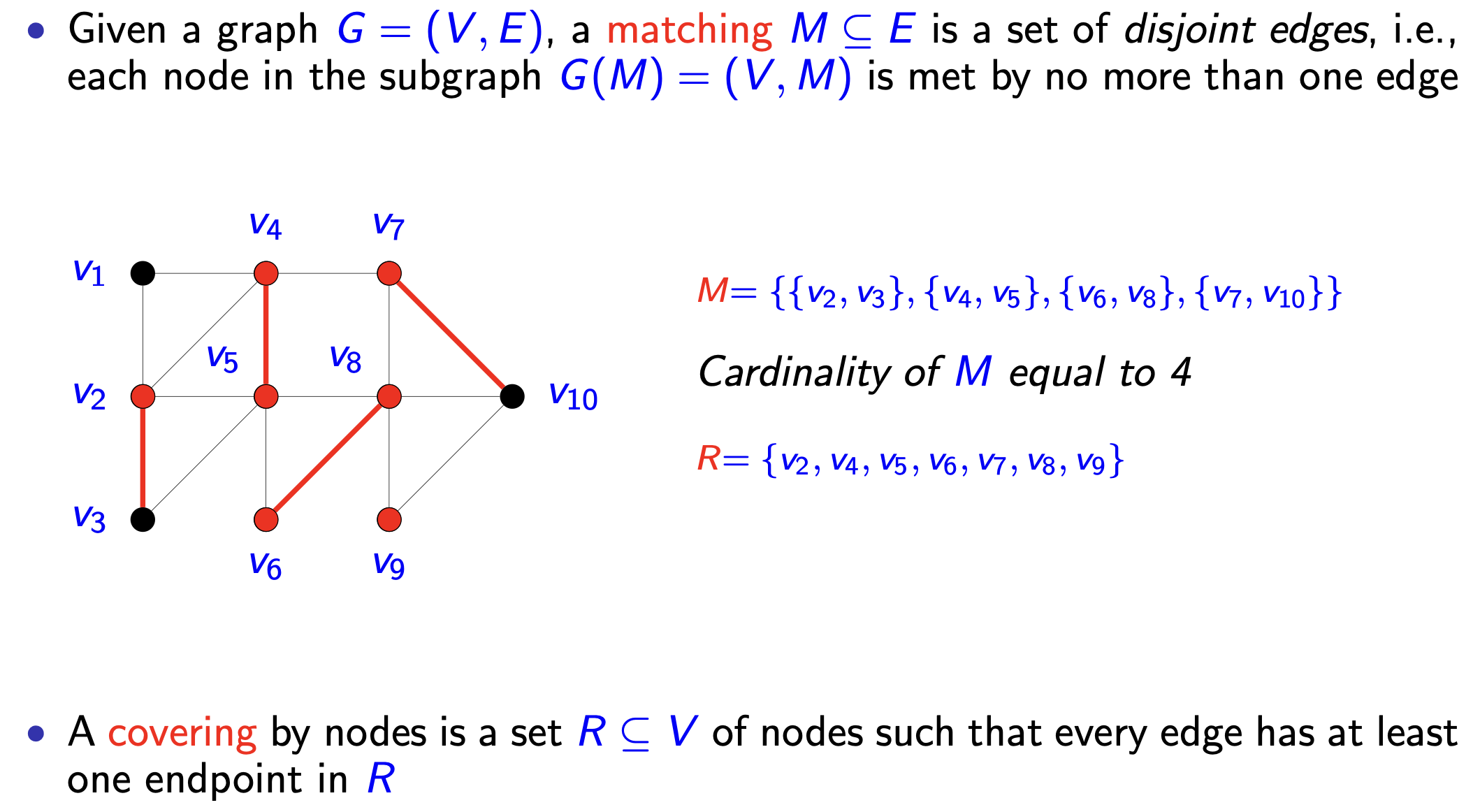
节点覆盖(Covering by nodes):
节点覆盖(covering by nodes)是节点集 \(R \subseteq V\),使得每条边至少有一个端点在 \(R\) 中。
命题 4:弱对偶对
以下两个问题形成弱对偶对: 1. 最大基数匹配问题:\(\max_{M \subseteq E} \{|M| : M \text{ is a matching}\}\) 2. 最小基数节点覆盖问题:\(\min_{R \subseteq V} \{|R| : R \text{ is a covering by nodes}\}\)
证明:
若 \(M = \{(i_1, j_1), \ldots, (i_k, j_k)\}\) 是匹配,则 \(2k\) 个节点 \(\{i_1, j_1, \ldots, i_k, j_k\}\) 互不相同。任何节点覆盖 \(R\) 必须包含每对 \(\{i_s, j_s\}\) 中至少一个节点(\(s = 1, \ldots, k\))。因此 \(|R| \geq k = |M|\)。
定义 3:节点 - 边关联矩阵 (Node-edge incidence matrix)
图 \(G = (V, E)\) 的节点 - 边关联矩阵是一个 \(n = |V|\) 行 \(m = |E|\) 列的 0-1 矩阵 \(A\),其中 \(a_{je} = 1\) 当且仅当节点 \(j\) 是边 \(e\) 的端点,否则 \(a_{je} = 0\)。
整数规划表述:
\[
z = \max \{1x : Ax \leq 1, x \in \mathbb{Z}_{+}^{m}\} \quad \Leftrightarrow \quad w = \min \{1y : yA \geq 1, y \in \mathbb{Z}_{+}^{n}\}
\]
与强对偶的差距:
考虑对应 LP 松弛的值 \(z^{LP}\) 和 \(w^{LP}\),有 \(z \leq z^{LP} = w^{LP} \leq w\)。
但整数规划问题之间不存在强对偶:
- 反例:\(G = (\{1,2,3\}, \{\{1,2\}, \{1,3\}, \{2,3\}\})\)(三角形)
- \(z = 1\)(最大匹配大小为 1),\(w = 2\)(最小节点覆盖大小为 2)
- 但 LP 松弛可行解:\(x_{\{1,2\}} = x_{\{1,3\}} = x_{\{2,3\}} = 1/2\) 和 \(y_1 = y_2 = y_3 = 1/2\)
- 因此 \(z^{LP} = w^{LP} = 3/2\)
4. 枚举方法 (Enumerative Methods)⚓︎
4.1 概述⚓︎
枚举法和启发式法用于求解离散优化问题(精确或近似)。分支定界(Branch and bound)和分支切割(branch and cut)方法是商业求解器中用于整数优化的主要方法,结合了枚举和定界技术。
动态规划方法使用隐式枚举,通常比显式枚举导致更好的复杂度结果(见第 7 讲)。
核心原则
获得紧的界(tight bounds)是枚举方法中最重要的方面。
4.2 分支定界法 (Branch and Bound)⚓︎
分支定界使用分治(divide and conquer)方法探索可行整数解集合,利用最优成本的界来避免探索可行解集的某些部分。
考虑问题:
\[
z = \min \{c x: x \in S \}
\]
命题 5:分治 (divide and conquer)
设 \(S = S^1 \cup S^2 \cup \cdots \cup S^k\)(\(i = 1, \ldots, k\))是 \(S\) 的分解,令 \(z^i = \min \{c x : x \in S^i\}\)。则: $$ z = \min {z^i : i = 1, \ldots, k} $$
将原问题划分为子问题称为分支(branching)。递归分解可表示为枚举树(enumeration tree)。
命题 6:定界传播
设 \(S = S^1 \cup S^2 \cup \cdots \cup S^k\) 且 \(z^i = \min \{cx : x \in S^i\}\)。假设给定 \(\underline{z}^i\) 和 \(\overline{z}^i\) 满足 \(\underline{z}^i \leq z^i \leq \overline{z}^i\)(\(i = 1, \ldots, k\))。则对于 \(z = \min \{z^i : i = 1, \ldots, k\}\) 有: $$ \underline{z} \leq z \leq \overline{z} $$ 其中: - \(\underline{z} = \min \{\underline{z}^i : i = 1, \ldots, k\}\) 是下界 - \(\overline{z} = \min \{\overline{z}^i : i = 1, \ldots, k\}\) 是上界
4.3 剪枝规则 (Pruning Rules)⚓︎
基于上述命题,可推导出剪枝枚举树的规则:
| 规则 | 条件 | 动作 |
|---|---|---|
| 最优性剪枝(Pruning by optimality) | \(\underline{z}^i = \overline{z}^i\) | 第 \(i\) 个子问题的最优解值已知,无需细分 \(S^i\) |
| 界剪枝(Pruning by bound) | \(\underline{z}^i > \overline{z}^j\)(\(i \neq j\)) | 第 \(i\) 个子问题的最优解不可能是整体最优,无需细分 \(S^i\) |
| 不可行性剪枝(Pruning by infeasibility) | \(S^i = \emptyset\) | 无需细分 \(S^i\) |
4.4 通用分支定界算法⚓︎
设 \(P^0\) 是定义在 \(S\) 上的初始问题,\(\mathcal{L}\) 表示待处理问题集合。
分支定界算法步骤
步骤 1. 初始化:\(\mathcal{L} = \{P^0\}\),\(S^0 = S\),\(\underline{z}^0 = -\infty\),\(\overline{z} = \infty\)(当前最优值)。
步骤 2. 终止测试:若 \(\mathcal{L} = \emptyset\),则产生 \(\overline{z} = cx^*\) 的解 \(x^*\) 是最优的。
步骤 3. 问题选择与松弛:选择 \(P^i \in \mathcal{L}\),设置 \(\mathcal{L} = \mathcal{L} \setminus \{P^i\}\)。求解其松弛 \(RP^i\),令 \(z_R^i\) 和 \(x_R^i\) 分别为最优值和最优解(如果存在)。
步骤 4. 不可行性剪枝:若 \(S^i = \emptyset\),返回步骤 2。
步骤 5. 界剪枝: - 若 \(z_R^i \geq \overline{z}\),返回步骤 2。 - 若 \(x_R^i \notin S^i\),转到步骤 6。 - 若 \(x_R^i \in S^i\) 且 \(cx_R^i < \overline{z}\),令 \(\overline{z} = cx_R^i\)。从 \(\mathcal{L}\) 中删除所有满足 \(\underline{z}^i > \overline{z}\) 的问题。若 \(cx_R^i = z_R^i\),返回步骤 2。
步骤 6. 分支:设 \(\{S^{ij}\}_{j=1}^k\) 是 \(S^i\) 的划分。将问题 \(\{P^{ij}\}_{j=1}^k\) 加入 \(\mathcal{L}\),其中 \(\underline{z}^{ij} = z_R^i\)(\(j = 1, \ldots, k\))。返回步骤 2。
4.5 搜索树 (Search Tree)⚓︎
- 树的每个节点代表一个子问题。
- 每个子问题链接到其父节点,并最终链接到其子节点。
- 尚未考虑的子问题称为候选处理对象(candidate for processing)。
- 候选处理对象的集合称为候选列表(candidate list)(例如集合 \(\mathcal{L}\))。
5. 分支定界中的选择策略 (Choices in Branch and Bound)⚓︎
5.1 搜索策略 (Search Strategies)⚓︎
选择下一个处理问题的规则称为搜索策略(search strategy)。目标可能是:
- 最小化找到可证明最优解所需的时间。
- 在有限时间内找到最好的可能解。
主要搜索策略:
| 策略 | 描述 | 优点 | 缺点 |
|---|---|---|---|
| 最优优先(Best First) | 选择具有最佳界(最小下界)的子问题 | 通常最小化枚举树大小 | 可能内存使用大,节点设置成本高 |
| 深度优先(Depth First) | 选择最深的节点 | 节省内存,更快找到可行解 | 通常导致更大的枚举树 |
| 基于估计的策略 | 使用启发式估计选择节点 | 平衡探索与利用 | 需要设计估计函数 |
| 混合策略(Hybrid Strategy) | 结合多种策略 | 灵活适应不同问题 | 实现复杂度较高 |
示例比较:
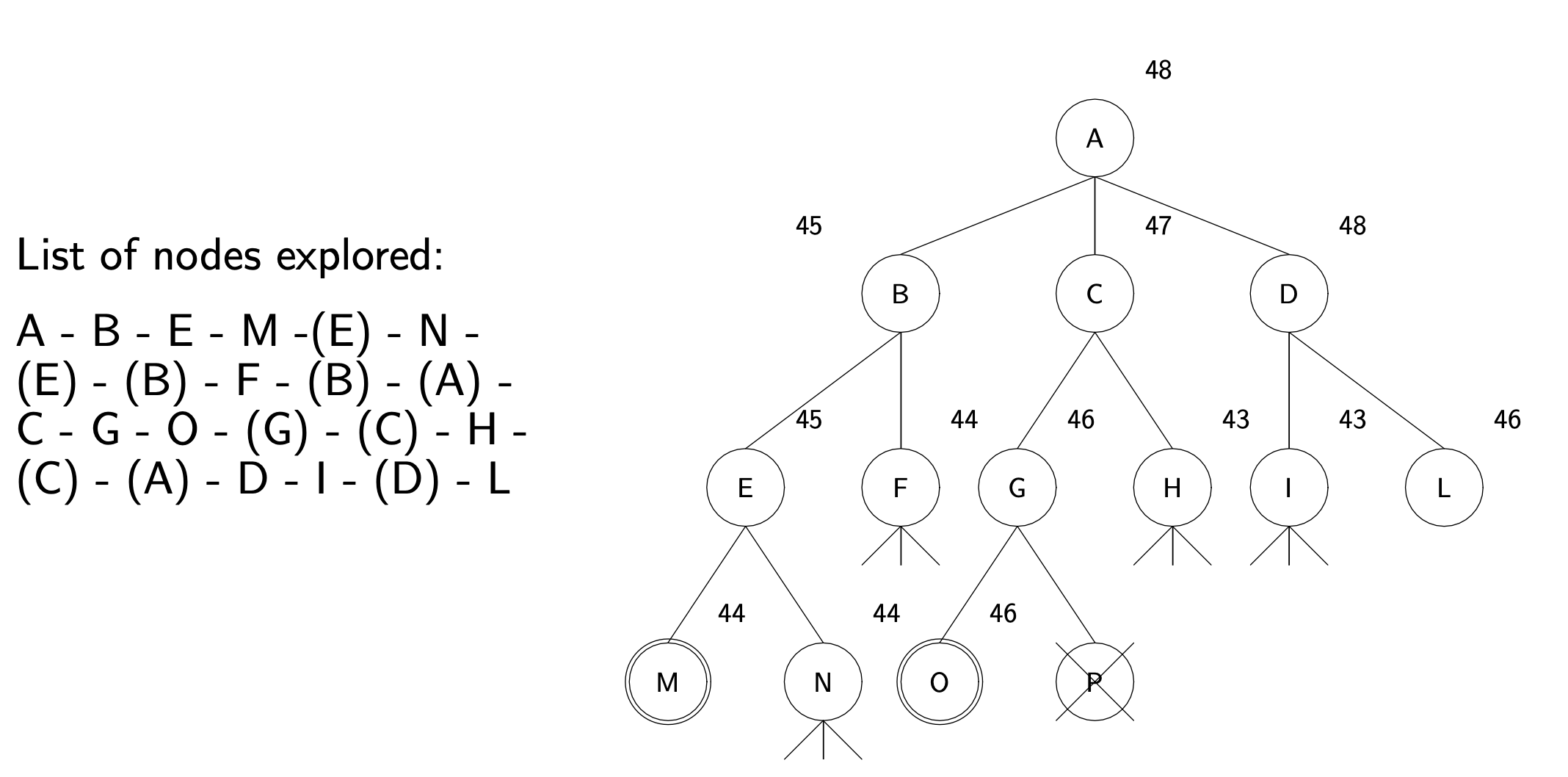
深度优先探索顺序:A - B - E - M - (E) - N - (E) - (B) - F - (B) - (A) - C - G - O - (G) - (C) - H - (C) - (A) - D - I - (D) - L
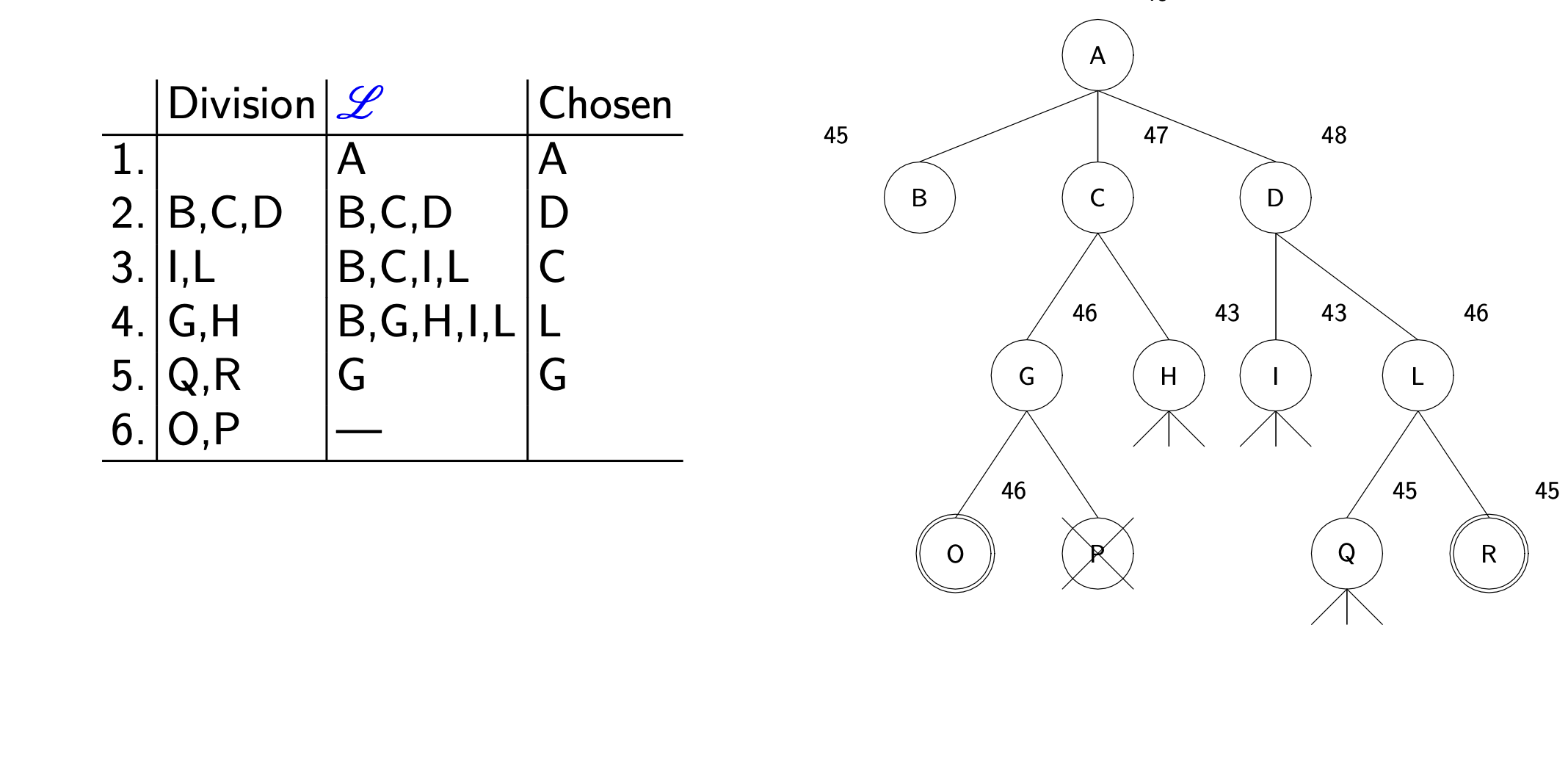
最优优先探索顺序表格:
| 步骤 | 分支 | 候选列表 \(\mathcal{L}\) | 选择 |
|---|---|---|---|
| 1 | A | A | |
| 2 | B,C,D | B,C,D | D |
| 3 | I,L | B,C,I,L | C |
| 4 | G,H | B,G,H,I,L | L |
| 5 | Q,R | B,G,H,I,Q,R | G |
| 6 | O,P | B,H,I,O,P,Q,R | ... |
5.2 分支策略 (Branching)⚓︎
对于整数规划,将问题划分为 \(k\) 个子问题通过逻辑析取(logical disjunctions)描述,即形如以下的约束:
\[
x \in \bigcup_{1 \leq i \leq k} X_i
\]
若 \(\bigcup_{1\leq i\leq k}X_i\supset S\),则析取 \(\{X_i\}_{i=1}^k\) 对可行集为 \(S\) 的问题是有效的(valid)。
理想情况下 \(\bigcup_{1\leq i\leq k}X_i = S\) 且 \(X_i \cap X_j = \emptyset\)(\(i \neq j\))。
两种主要分支类型:
- 超平面分支(Branching on Hyperplanes):
使用给定超平面划分可行域。当 \(S \subseteq \mathbb{Z}^n\) 时,由整数超平面 \(\pi x\)(\(\pi \in \mathbb{Z}^n\))定义的析取是有效的(当 \(\alpha \in \mathbb{Z}\)): $$ X_1 = {x \in \mathbb{R}^n : \pi x \geq \alpha} \text{ 和 } X_2 = {x \in \mathbb{R}^n : \pi x \leq \alpha - 1} $$
- 变量分支(Branching on Variables):
对变量 \(x_j\) 的界限约束进行分支。在二元整数规划(Binary Integer Programming)的特殊情况下,有效的析取是 \(x_j = 0\) 或 \(x_j = 1\)。
分支选择方法(估计分支效果):
- 伪成本分支(Pseudocost Branching)
- 强分支(Strong Branching)
- 可靠性分支(Reliability Branching)
- 局部分支(Local Branching)
6. 基于 LP 的分支定界示例 (LP-Based Branch and Bound)⚓︎
6.1 通用设置⚓︎
| 组件 | 设置 |
|---|---|
| 定界 | LP 松弛 |
| 策略 | 最优优先(Best First) |
| 分支 | 选择非整数的 \(x_j > 0\),设置:\(S^1 = S \cap \{x : x_j \leq \lfloor x_j \rfloor\}\),\(S^2 = S \cap \{x : x_j \geq \lceil x_j \rceil\}\) |
6.2 具体示例⚓︎
问题:
\[
\begin{array}{r l r l}
\max & x_1 & +x_2 & \\
& 4x_1 & -2x_2 & \geq 1 \\
& 4x_1 & +2x_2 & \leq 11 \\
& & 2x_2 & \geq 1 \\
& & x_1, x_2 & \geq 0 \text{ integer}
\end{array}
\]
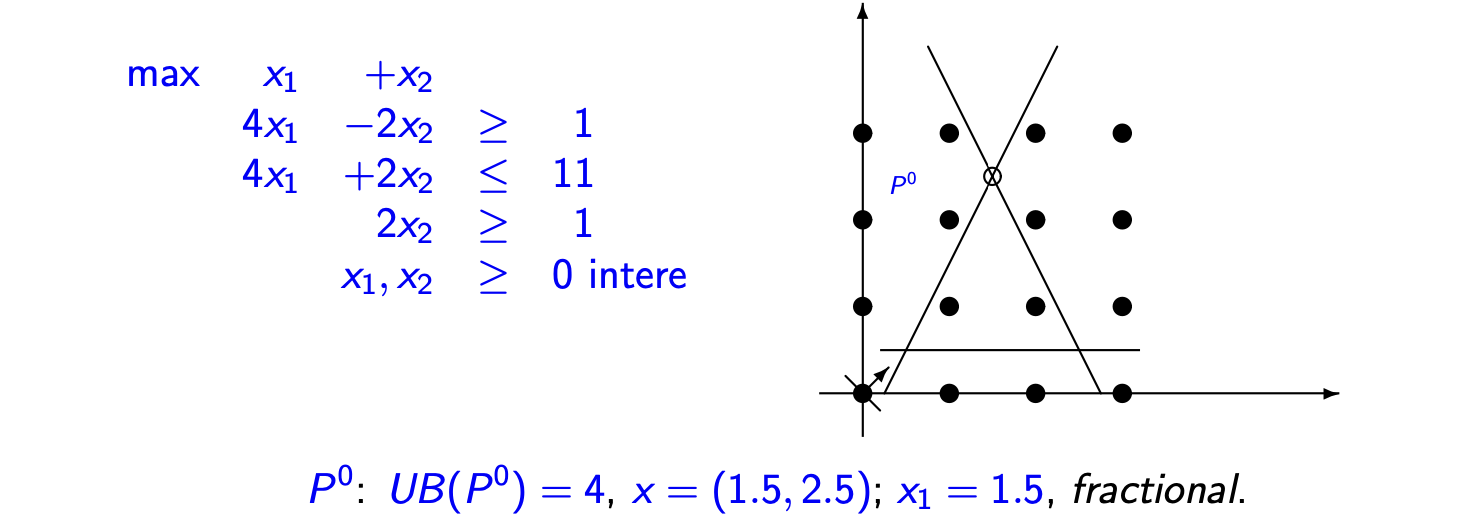
节点展开过程:
| 节点 | 上界 | 解 | 分数变量 | 分支 |
|---|---|---|---|---|
| \(P^0\) | \(UB(P^0) = 4\) | \(x = (1.5, 2.5)\) | \(x_1 = 1.5\) | 分支 1 & 2 |
| \(P^1\) | \(UB(P^1) = 2.5\) | \(x = (1, 1.5)\) | \(x_2 = 1.5\) | 分支 3 & 4 |
| \(P^2\) | \(UB(P^2) = 3.5\) | \(x = (2, 1.5)\) | \(x_2 = 1.5\) | 继续分支 |
| \(P^3\) | \(UB(P^3) = 3.25\) | \(x = (2.25, 1)\) | \(x_1 = 2.25\) | 继续分支 |
| \(P^4\) | 不可行 | - | - | 剪枝 |
完整枚举树(生成\(P^5\)和\(P^6\)后):
7. 背包问题的分支定界 (Branch and Bound for the Knapsack Problem)⚓︎
| 组件 | 设置 |
|---|---|
| 定界 | LP 松弛(贪心算法计算) |
| 策略 | 深度优先(Depth First) |
| 分支 | 选择非整数的 \(x_j > 0\),设置:\(S^1 = S \cap \{x : x_j = 1\}\),\(S^2 = S \cap \{x : x_j = 0\}\) |
枚举树结构:
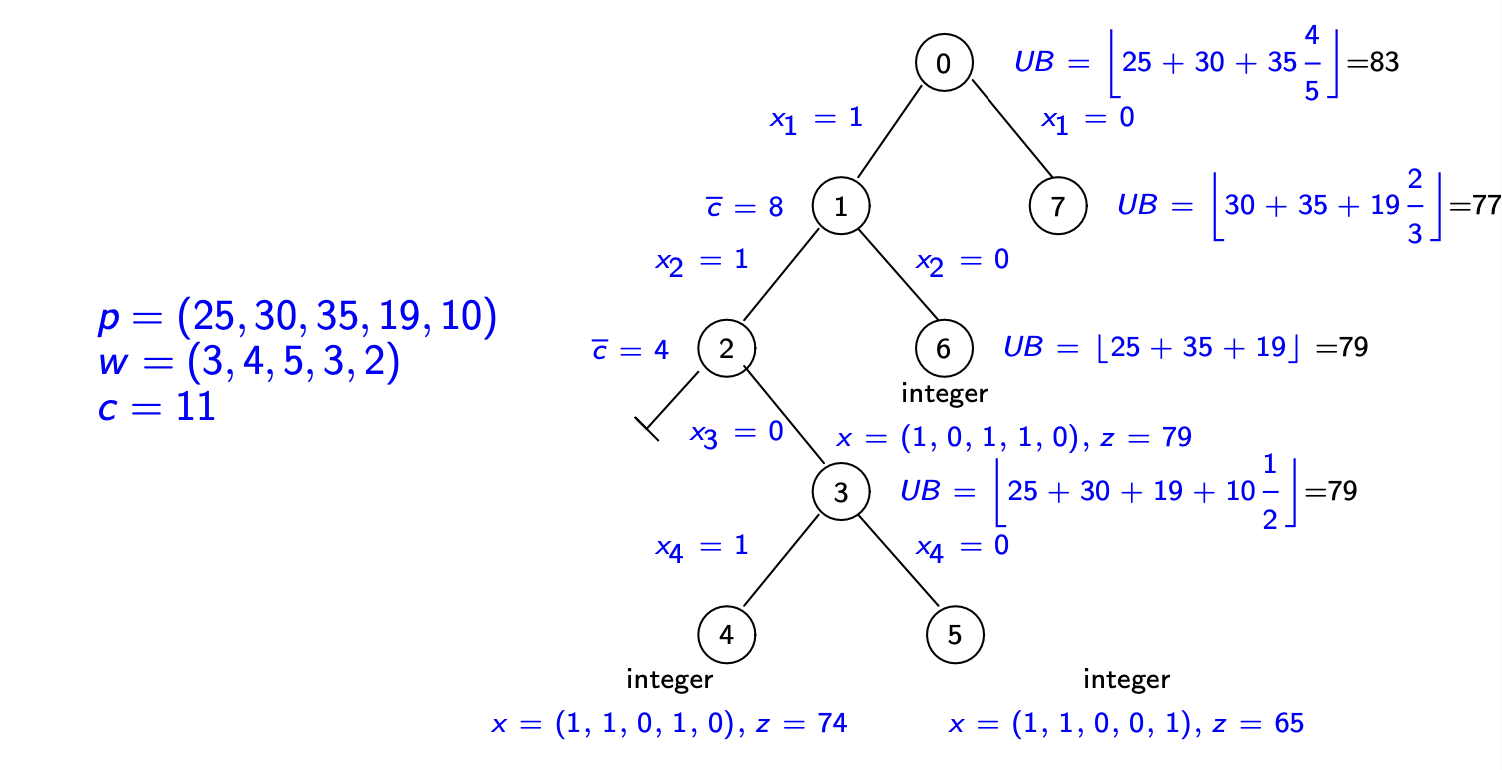
数值示例:
- 价值 \(p = (25, 30, 35, 19, 10)\)
- 重量 \(w = (3, 4, 5, 3, 2)\)
- 容量 \(c = 11\)
节点计算:
| 节点 | 条件 | 上界计算 | 结果 |
|---|---|---|---|
| 节点 0 | 初始 | \(UB = \lfloor 25 + 30 + 35 \cdot \frac{4}{5} \rfloor\) | \(83\) |
| 节点 7 | \(x_1=0\) | \(UB = \lfloor 30 + 35 + 19 \cdot \frac{2}{3} \rfloor\) | \(77\) |
| 节点 6 | \(x_1=1, x_2=0\) | \(UB = \lfloor 25 + 35 + 19 \rfloor\) | \(79\),整数解 \(x=(1,0,1,1,0), z=79\) |
| 节点 3 | \(x_1=1, x_2=1, x_3=0\) | \(UB = \lfloor 25 + 30 + 19 + 10 \cdot \frac{1}{2} \rfloor\) | \(79\) |
8. TSP 的分支定界 (Branch and Bound for the TSP)⚓︎
基于 1-树松弛(1-tree relaxation)。
符号:用弧集 \(E_k\)(排除)和 \(I_k\)(包含)描述子问题 \(k\) 的解。
- \(x_{ij} = 1\) 若 \(\{i,j\} \in I_k\)
- \(x_{ij} = 0\) 若 \(\{i,j\} \in E_k\)
子问题 \(k\) 的松弛在 1-树松弛约束之外增加上述约束定义。
分支规则 1
选择条件:选择度数不为 2 的顶点 \(i\),选择当前 1-树中与 \(i\) 关联的最大成本边 \(\{i,j\}\)。
生成两个新子问题: - \(k1\):\(E_{k1} = E_k \cup \{\{i,j\}\}\),\(I_{k1} = I_k\)(排除该边) - \(k2\):\(E_{k2} = E_k\),\(I_{k2} = I_k \cup \{\{i,j\}\}\)(包含该边)
注意:节点 \(k\) 的最小 1-树对子问题 \(k2\) 仍可行。
分支规则 2
选择条件:选择度数超过 2 的顶点 \(i\),选择两条自由边(不在 \(I_k\) 中)\(\{i,j_1\}, \{i,j_2\}\)。
生成三个新子问题: - \(k1\):\(E_{k1} = E_k \cup \{\{i,j\} : j \notin \{j_1,j_2\}\}\),\(I_{k1} = I_k \cup \{\{i,j_1\}, \{i,j_2\}\}\)(强制包含这两条) - \(k2\):\(E_{k2} = E_k \cup \{\{i,j_2\}\}\),\(I_{k2} = I_k \cup \{\{i,j_1\}\}\)(包含\(j_1\)排除\(j_2\)) - \(k3\):\(E_{k3} = E_k \cup \{\{i,j_1\}\}\),\(I_{k3} = I_k\)(排除\(j_1\))
注意:若 \(i\) 与 \(I_k\) 中的边关联,则不生成节点 \(k1\)。节点 \(k\) 的 1-树对每个后继节点都不可行。
9. 分支定界:补充主题 (Additional Topics)⚓︎
预处理(Preprocessing)⚓︎
在求解线性或整数规划前,应使形式尽可能强。可通过以下规则强化:
| 规则 | 描述 |
|---|---|
| 收紧界(Tightening Bounds) | 通过逻辑推导收紧变量上下界 |
| 冗余约束(Redundant Constraints) | 识别并移除不影响可行域的约束 |
| 变量固定(Variable Fixing) | 基于界分析固定某些变量的值 |
平衡策略⚓︎
核心权衡
总求解时间 = 枚举节点数 × 每个节点处理时间
定界的目标是在界强度与计算效率之间取得平衡(achieve a balance between the strength of the bound and the efficiency with which it can be computed)。
启发式原始界⚓︎
在根节点和枚举树的不同节点使用启发式方法寻找原始界(primal bounds)也是分支定界方法的关键方面。
10. 注释与参考文献 (Notes and References)⚓︎
| 主题 | 参考文献 |
|---|---|
| LP-based branch and bound | Nemhauser and Wolsey [4, Section II.4.2];对偶单纯形算法进行再优化 [4, chap. 7.3] |
| TSP 的分支定界方法 | Lawler [3, chap. 10];强分支技术见 Applegate et al. [1] |
| 预处理规则 | Nemhauser and Wolsey [4, Section I.1.6] 和 Wolsey [5, chap. 7.6] |
11. 参考文献 (Bibliography)⚓︎
- Applegate, D. L., Bixby, R. E., Chvatal, V., & Cook, W. J. (2007). The Traveling Salesman Problem: A Computational Study (Princeton Series in Applied Mathematics). Princeton University Press.
- Bazaraa, M. S., Jarvis, J. J., & Sherali, H. F. (2010). Linear Programming and Network Flows (4th ed.). John Wiley & Sons.
- Lawler, E. (1985). The Traveling Salesman Problem: A Guided Tour of Combinatorial Optimization. Wiley.
- Nemhauser, G. L., & Wolsey, L. A. (1988). Integer and combinatorial optimization. Wiley-Interscience.
- Wolsey, L. A. (1998). Integer programming. Wiley-Interscience.