最小费用流:建模,拓展⚓︎
约 4966 个字 1 张图片 预计阅读时间 17 分钟 总阅读量 次
最小费用流问题(Minimal Cost Flow Problem)在网络最优化问题中占有核心地位。可以表述如下:
给定图 \(G(V,E)\),对每个节点 \(v_i\) 均给定实数 \(b_i\), 如果 \(b_i > 0\),那么称 \(b_i\) 为发点,可以供给资源,\(b_i\) 的值为该点的供给量。如果 \(b_i < 0\),那么称 \(b_i\) 为收点,需要接收资源, \(-b_i\) 为该点的需求量。若 \(b_i = 0\),那么称 \(b_i\) 为转运点。
对于每条边 \(e_j\),给定实数 \(c_j\),它是在边 \(e_j\) 上每单位流量的费用,称为费用系数。再给定正数 \(u_j\),它是边 \(e_j\) 上流量的上界。
最小费用流的问题就是要确定每个边上的流量 \(x_j\),使得不超过上界限制,并满足各个节点的供需要求,同时又使得总费用最小。对于网络,我们引入一个 \(m \times n\) 的矩阵 \(A\)。其中每个元素按照如下标准取值:
\[\begin{aligned}\begin{equation*}
a_{ij} = \begin{cases}
1, \hspace{10pt} \text{if } e_j \quad \text{starts from} \quad v_i \\
-1, \hspace{10pt} \text{if } e_j \quad \text{ends at} \quad v_i \\
0, \hspace{10pt} \text{Otherwise}
\end{cases}
\end{equation*}\end{aligned}\]
写成矩阵形式,如下:
\[\begin{bmatrix} 1 & 1 & 0 & 0 & 0 & 1 & 0 & 0 \\ -1 & 0 & 1 & 1 & 0 & 0 & 0 & 0 \\ 0 & -1 & -1 & 0 & 1 & 0 & -1 & 0 \\ 0 & 0 & 0 & -1 & -1 & 0 & 0 & -1 \\ 0 & 0 & 0 & 0 & 0 & -1 & 1 & 1 \end{bmatrix}\]
即可表示如图的网络。
flowchart LR
1-- (1,2) --->2
1-- (1,3) --->3
1-- (1,5) --->5
2-- (2,3) --->3
2-- (2,4) --->4
3-- (3,4) --->4
5-- (5,3) --->3
5-- (5,4) --->4在前面介绍最短路问题的时候,我们也出现了这个矩阵,一般称之为节点-边关联矩阵(Node-edge incidence matrix)。
事实上,最小费用流模型可以视为一种基于边的建模方式。由于上述矩阵的列数 = 边数,所以假设我们的决策变量是针对每一条边而言的,那么关联矩阵乘决策向量,正好构成了约束条件的左端项,同时约束条件的个数也就对应了节点个数,可以用此刻画节点中的流量关系。以矩阵乘法形式给出就是:
\[\begin{bmatrix} 1 & 1 & 0 & 0 & 0 & 1 & 0 & 0 \\ -1 & 0 & 1 & 1 & 0 & 0 & 0 & 0 \\ 0 & -1 & -1 & 0 & 1 & 0 & -1 & 0 \\ 0 & 0 & 0 & -1 & -1 & 0 & 0 & -1 \\ 0 & 0 & 0 & 0 & 0 & -1 & 1 & 1 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \\ x_5 \\ x_6 \\ x_7 \\ x_8 \end{bmatrix}= \begin{bmatrix} b_1 \\ b_2 \\ b_3 \\ b_4 \\ b_5 \end{bmatrix}\]
节点-边关系矩阵
\(m \times n\) 的矩阵,行表示节点,列表示边。
对每一列而言,有且仅有一个1和一个-1,1表示从该节点出发,-1表示到该节点。0表示与该节点无关。
对每一行而言,可能有多个1和多个-1,因为一个节点可能有多条边出发/到达,1的个数,表示从该节点出发的边数(出度);-1的个数,表示到达该节点的边数(入度)。
于是,我们给出最小费用流的数学模型:
\[\min \mathbf{cx}\]
\[\begin{aligned}
\begin{cases}
\begin{align}
\mathbf{Ax} = \mathbf{b} \quad\\
\mathbf{0} \leq \mathbf{x} \leq \mathbf{u} \quad
\end{align}
\end{cases}
\end{aligned}\]
其中,\(\mathbf{A}\) 就是节点-边关系矩阵,\(\mathbf{x}\) 是边的流量向量,长度等于边的数量; \(\mathbf{b}\) 是每个节点的供求向量,长度等于节点的数量。\(\mathbf{u}\) 是边的流量限制向量,限制每条边的流量大小。
对于约束 (1) 中的每一个约束,可以表示为:
\[\sum \limits_{j \in E} a_{ij} x_j = b_i , \forall i \in V\]
实际上,左边就是:
\[\sum \limits_{j \in E} a_{ij} x_j = \sum \limits_{a_{ij} = 1} x_{j} - \sum \limits_{a_{ij} = -1} x_j , \forall i \in V\]
(因为如果 \(a_{ij} = 0\),就不会出现 \(x_j\) )。
等式右边的第一个和式,对应的是所有从 \(v_j\) 离开的流量;第二个和式,对应所有汇入 \(v_j\) 的流量。
不失一般性,我们可以假设供求总是平衡的,也就是 \(\sum_{i \in V} b_i = 0\),对于供大于求的图 (\(\sum_{i \in V} b_i > 0\)),可以设置一个虚拟节点,吸收全部的过剩供给量,从每个发点添加一个虚拟边到这个虚拟节点,这个虚拟边的费用是0。这样就转化为一个供求平衡的最小费用流问题。
最小费用流问题是网络流问题的重要基础,事实上,许多问题均可以被转化为这类问题,或者是最小费用流问题的一个特例。下面展开几个例子。
从最小费用流到运输问题⚓︎
运输问题,具体的问题描述同样可以参考第三章。这里简要复习一下。
运输问题
给定一张图\(G(V,E)\),所有节点分为供给节点和需求节点两类。各个供给节点之间没有边相连,各个需求节点之间也没有边相连,但是供给和需求节点之间可以相互抵达。以图论的概念表示,网络图就是一个Bipartite Graph(二分图,概念的具体解释见本笔记最后)。
- 问题:我们需要在事先给定运费和供给量的情况下,规划从不同供给节点到不同需求节点运送的货物量,使得总运输成本最小,同时还能满足所有需求节点的需求。
在第三章,我们已经给出了运输问题在供需平衡下的建模, 由于我们考虑的是不带转运的运输问题,因此建模如下:
\[\mathop{\min} \hspace{4pt} z = \sum \limits^{m}_{i = 1} \sum \limits^{n}_{j = 1} c_{ij}x_{ij}\]
\[s.t \hspace{4pt} \left\{ \begin{aligned} \sum \limits^{n}_{j=1} x_{ij} = a_i , i = 1,2,..,m \\ \sum \limits^{n}_{i=1} x_{ij} = b_j , j = 1,2,..,n \\ x_{ij} \geq 0, i = 1,2,...m, j = 1,2...n \end{aligned} \right.\]
这里的决策变量 \(x_{ij}\) 是基于节点的,表示从 \(i\) 地到 \(j\) 地的流量。我们同样可以基于最小费用流模型框架给出模型,差异在于,基于最小费用流模型的决策变量是基于边的。 \(y_{ij}\) 表示边 \((i,j) \in E\) 从 \(i\) 流到 \(j\)的流量。我们保持节点-边关系矩阵 (incidence-matrices)不变,作为系数矩阵, \(c_{ij}\) 表示边 \((i,j)\) 上的运输成本。所以可以给出等价模型:
\[\mathop{\min} \hspace{4pt} z = \sum \limits_{(i,j) \in E} c_{ij} y_{ij} \]
\[\begin{aligned}
\begin{cases}
\begin{align}
\sum \limits_{ (i, j) \in E} y_{ij} - \sum \limits_{(j, i) \in E} y_{ji} = d_i, \quad \forall i \in V \\
y_{ij} \geq 0, \quad \forall (i,j) \in E
\end{align}
\end{cases}
\end{aligned}\]
这里的右端项 \(d_i\) 表示:运输问题下,节点 \(i\) 的需求情况。由于节点区分供给点和需求点,因此,有如下情形:
- 如果 \(i\) 是供给点,记该点的供给量为 \(a_i\),则 \(d_i = a_i\);
- 如果 \(i\) 是需求点,记该点的需求量为 \(b_i\),则 \(d_i = -b_i\)。
事实上,基于此,我们也可以很容易地写出基于边的建模框架下,带转运的运输问题的模型。
解答
实际上,你只需要更改一下 \(d_i\) 的定义即可,除了收地、发地外,还要考虑中转地,中转地不存储货物,因此中转点的 \(d_i = 0\),也就是流平衡约束。
从最小费用流到指派问题⚓︎
指派问题可以视为运输问题的一个特例,实际背景是把 n 个活分配给 n 个人去做,每个人做不同工作有不同的时间,每个人都做一个工作,使得总时间最少。
上面已经写了最小费用流 -> 运输问题,只需要稍微修改就可以得到分配问题的建模。
限制每个节点的供给/需求量都是1,每个边上的流量只能为0或者1.
从最小费用流到最短路问题⚓︎
从最小费用流模型也可以推导出最短路问题的建模。一句话概括一下最短路:
已知一个网络上各边长度,要求出从图上给定的节点 \(v_s\) 到 节点 \(v_t\) 的最短路径。
事实上,只需要把最小费用流的系数 \(c_{ij}\) 换成边 \((i,j)\) 的长度。令右端项中 \(b_s = 1, b_t = -1\),其他 \(b_i = 0\),就得到了最短路问题的模型。这其实就是限制了除了起点和终点外其他节点都视为转运点。各个边上的流量上界 \(u_{ij}\) 取 1。这样就得到了最短路问题的建模。这个建模可以参考第七章:最短路问题 .
从最小费用流到最大流问题⚓︎
从最小费用流模型也可以推导出最大流问题的建模。一句话概括一下最大流:
已知一个网络上各边的流量上界,每个边的流量不得超过这个界限。要求出从图上给定的节点 \(v_s\) 到 节点 \(v_t\) 的最大流量。
看起来不怎么相关的问题,也可以转化为最小费用流进行计算。
flowchart LR
1-- (1,2,5) --->2
1-- (1,3,4) --->3
1-- (1,5,9) --->5
2-- (2,3,7) --->3
2-- (2,4,3) --->4
3-- (3,4,8) --->4
5-- (5,3,3) --->3
5-- (5,4,1) --->4
4-. (4,1) -.->1我们先令原来网络中所有边的费用系数向量 \(\mathbf{c} = \mathbf{0}\),令供求向量 \(\mathbf{b} = \mathbf{0}\)。此时,我们添加一条虚拟边 \(e_{n+1}\),从终止节点 \(v_t\) 通往 \(v_s\)。这条边上的流量没有上界限制,其费用系数为负数,设为 \(-1\)。
此时,求解包括这个虚拟边的新图的最小费用流问题。因为虚拟弧的边权(费用系数)是负数,所以当目标函数最小的时候,这条边上的流量也就达到最大了。同时,由于 \(\mathbf{b} = \mathbf{0}\),意味着所有节点的流入和流出的流量是相等的(包括起点和终点,与之不同的,最小费用流问题的起终点的流量不为0)。
上述建模方式,实际上是,虚拟边流入节点 \(v_s\) 的流量就要在原来的网络上以零费用返回节点 \(v_t\),也就是说只要不超过各边的流通能力,从 \(v_s\) 到 \(v_t\) 的流量越大。
最小费用流问题的对偶⚓︎
考虑最小费用流问题的原始线性规划形式:
\[
\begin{aligned}
\min \quad & \sum_{(i,j)\in E} c_{ij} x_{ij} \\
\text{s.t.} \quad & \sum_{(i,j)\in E} x_{ij} - \sum_{(j,i)\in E} x_{ji} = b_i, \quad \forall i \in V \\
& 0 \le x_{ij} \le u_{ij}, \quad \forall (i,j) \in E
\end{aligned}
\]
其中节点‑边关联矩阵 \(A\) 隐含在第一个约束中。这是一个典型的线性规划:等式约束对应每个节点,变量有上界。
引入对偶变量:
- 对每个节点 \(i\) 的等式约束,引入节点势 \(\pi_i\)(无符号限制,因为等式约束对应自由变量)。
- 对每条边的上界约束 \(x_{ij} \le u_{ij}\),引入非负对偶变量 \(w_{ij} \ge 0\)。
则对偶问题可写为:
\[
\begin{aligned}
\max \quad & \sum_{i\in V} b_i \pi_i - \sum_{(i,j)\in E} u_{ij} w_{ij} \\
\text{s.t.} \quad & \pi_i - \pi_j - w_{ij} \le c_{ij}, \quad \forall (i,j)\in E \\
& w_{ij} \ge 0, \quad \forall (i,j)\in E
\end{aligned}
\]
- 第一个约束来自原始变量 \(x_{ij}\) 的系数。若边 \((i,j)\) 从 \(i\) 指向 \(j\),则它在节点 \(i\) 的约束中系数为 \(+1\),在节点 \(j\) 的约束中系数为 \(-1\),因此对应对偶变量贡献为 \(\pi_i - \pi_j\),再减去 \(w_{ij}\)
因为 \(x_{ij} \le u_{ij}\) 的约束方向是 \(\le\),对偶变量取非负,在拉格朗日函数中会产生 \(-w_{ij}\) 项),最终形成 \(\pi_i - \pi_j - w_{ij} \le c_{ij}\)。
- 目标函数中,\(\sum b_i \pi_i\) 来自原始等式右端项,\(-\sum u_{ij} w_{ij}\) 来自上界约束的右端项(因为不等式方向是 \(x_{ij} \le u_{ij}\),对偶后取负号)。
最大加权闭合子图 (Maximum Weight Closure)⚓︎
给定有向图 \(G = (N, A)\),其中每个节点 \(i \in N\) 有权重 \(w_i\)。
闭合子图(Closure):子集 \(S \subseteq N\) 称为闭合子图,当且仅当:
\[\text{若 } i \in S \text{ 且 } (i,j) \in A, \text{ 则 } j \in S\]
即:没有弧从 \(S\) 指向 \(N \setminus S\)。
决策变量:
\[y_i = \begin{cases} 1, & \text{节点 } i \text{ 被选入闭合子图} \\ 0, & \text{否则} \end{cases}\]
完整模型:
\[
\begin{aligned}
\max \quad & \sum_{i \in N} w_i y_i \\
\text{s.t.} \quad & y_i - y_j \leq 0, & \forall (i,j) \in A \\
& 0 \leq y_i \leq 1, & \forall i \in N \\
& y_i \in \mathbb{Z}, & \forall i \in N
\end{aligned}
\]
约束解释:
- \(y_i - y_j \leq 0\) 等价于 \(y_i \leq y_j\),即:若选 \(i\)(\(y_i=1\)),则必选 \(j\)(\(y_j=1\))
- 这恰好刻画了闭合子图的定义
最大权闭合子图问题可以转换为最小割问题(最大流问题的对偶):
- 构造网络:
- 添加源点 \(s\) 和汇点 \(t\)
- 若 \(w_i > 0\):添加弧 \((s, i)\),容量为 \(w_i\)
- 若 \(w_i < 0\):添加弧 \((i, t)\),容量为 \(-w_i\)
-
原图弧 \((i,j) \in A\):容量设为 \(+\infty\)
-
求解最小 \(s\)-\(t\) 割 \((S^*, T^*)\)
-
最大权闭合子图:\(S^* \setminus \{s\}\)
对着标准的最小费用流问题做一些特殊的设置:
- 所有费用 \(c_{ij} = 0\)(零费用)
- 源点 \(s\) 的供应 \(b_s = \sum_{w_i > 0} w_i\)
- 汇点 \(t\) 的需求 \(b_t = -\sum_{w_i > 0} w_i\)
- 其他节点 \(b_i = 0\)
- 弧容量按上述规则设置
此时,最小割的对偶问题恰好给出:
\[\pi_i - \pi_j \leq 0 \quad \forall (i,j) \in A\]
这与闭合子图约束 \(y_i - y_j \leq 0\) 形式一致(令 \(y_i = \pi_i\))。
因此,最大权闭合子图 = 最小割 = 最大流的对偶,是最小费用流在零费用、特定供需下的特例。
最优性条件 (Optimality Conditions)⚓︎
(作为一年后的更新,)这一章节补充如何求解(算法)、如何判断最优(最优性条件)以及经典建模案例(Caterer Problem)。注意,下面会用到一些常见术语比如 Residual Network. 它在实际含义上与神经网络的略有区别。
在最大流问题中,我们只关心残差网络中的容量;而在最小费用流中,我们必须同时关心残差网络中的费用。
对于当前的可行流 \(x\),残差网络 \(G(x)\) 的定义如下:
- 前向弧 \((i, j)\):若 \(x_{ij} < u_{ij}\),则存在弧 \((i, j)\)。
- 残差容量:\(r_{ij} = u_{ij} - x_{ij}\)
- 费用:\(c_{ij}\)
- 后向弧 \((j, i)\):若 \(x_{ij} > 0\),则存在弧 \((j, i)\)。
- 残差容量:\(r_{ji} = x_{ij}\)
- 费用:\(-c_{ij}\) (注意:退回流量相当于减少成本,故费用为负)
定义弧 \((i, j)\) 的既约费用 (Reduced Cost) \(c_{ij}^\pi\) 为:
\[ c_{ij}^\pi = c_{ij} - \pi_i + \pi_j \]
物理含义: * \(\pi_i\) 可以理解为节点 \(i\) 的“势能”或“标高”。 * \(c_{ij}^\pi\) 表示考虑了节点势能变化后的相对成本。 * 重要性质:任意有向圈 \(W\) 的既约费用之和等于原始费用之和。
\[ \sum_{(i,j) \in W} c_{ij}^\pi = \sum_{(i,j) \in W} c_{ij} \]
定理 (最优性条件):
可行流 \(x^*\) 是最优解,当且仅当 存在节点势向量 \(\pi^*\),使得在残差网络 \(G(x^*)\) 中所有弧的既约费用非负:
\[ c_{ij}^{\pi^*} \geq 0, \quad \forall (i, j) \in G(x^*) \]
与负圈的关系:
- 残差网络中存在负费用圈 (Negative Cost Cycle) \(\iff\) 当前流不是最优解。
- 消除负圈的过程,本质上就是调整流 \(x\) 和势 \(\pi\) 直到满足上述最优性条件。
通俗讲,最优性条件说的就是,要想最优,那么 残差网络里所有路的“相对成本”都不能为负。
为什么?如果有条路相对成本是负的,说明顺着走能“省钱”(就像发现了一个套利漏洞),那你肯定要继续运货来降低成本,直到这个漏洞被填满(容量耗尽)或消失。这对应算法中的“负圈消除”。
假设你消除了所有的套利漏洞,说明再也找不到更省钱的方案了,这就是最优解。简单来说,“无负圈”等价于“无路可走(指省钱的路)”。此时流量分配已达经济平衡,任何调整只会增加或不改变总费用,就像水已经流到了最低势能面,无法再自发流动。
互补松弛条件⚓︎
设原始可行解 \(x^*\) 和对偶可行解 \((\pi^*, w^*)\) 分别为最优解,则它们满足:
我们这里用上述“既约成本”对互补松弛条件进行描述。
最优性条件(节点势形式):
存在一组节点势 \(\pi_i\),使得对于所有边 \((i,j) \in E\),有:
- 若 \(0 < x_{ij}^* < u_{ij}\),则 \(c_{ij}^\pi = 0\);
- 若 \(x_{ij}^* = 0\),则 \(c_{ij}^\pi \ge 0\);
- 若 \(x_{ij}^* = u_{ij}\),则 \(c_{ij}^\pi \le 0\)。
这个条件等价于在残差网络 \(G(x^*)\) 中所有弧的既约费用非负,也是负圈消除算法的理论基础。
对偶变量的直观理解
- \(\pi_i\) 可以理解为节点 \(i\) 的“势”或“影子价格”。若增加节点 \(i\) 的供给量(增大 \(b_i\)),目标函数值的增加率(边际成本)就是 \(\pi_i\)。
- \(w_{ij}\) 反映了边容量约束的松紧程度。若某边未达上限(\(x_{ij} < u_{ij}\)),由互补松弛知 \(w_{ij}=0\);若边满载(\(x_{ij}=u_{ij}\)),则 \(w_{ij}\ge 0\) 可能为正,表示每增加一单位容量所能节省的费用。
求解算法:负圈算法 (Cycle Canceling Algorithm)⚓︎
算法流程
- 寻找初始可行流:
- 忽略费用,仅满足容量和供需约束 \(Ax=b\)。
- 可通过构造辅助最大流问题求解(见下文)。
- 构建残差网络 \(G(x)\)。
- 检测负圈:
- 在 \(G(x)\) 中寻找总费用 \(< 0\) 的有向圈 \(W\)。
- 可使用 Bellman-Ford 或 SPFA 算法检测。
- 增广 (Augment):
- 若找到负圈 \(W\),计算瓶颈容量 \(\delta = \min \{r_{ij} : (i, j) \in W\}\)。
- 沿圈 \(W\) 推送 \(\delta\) 单位流量。
- 总费用减少 \(\delta \times |cost(W)|\)。
- 更新与终止:
- 更新残差网络。
- 若不存在负圈,则当前流为最优解。
最小费用流算法需要一个初始可行解。若直接寻找困难,可构造辅助问题:
- 添加超级源点 \(s^*\) 和超级汇点 \(t^*\)。
- 若 \(b_i > 0\) (供给),添加弧 \((s^*, i)\),容量 \(b_i\),费用 \(0\)。
- 若 \(b_i < 0\) (需求),添加弧 \((i, t^*)\),容量 \(-b_i\),费用 \(0\)。
- 添加弧 \((t^*, s^*)\),容量 \(\infty\),费用 \(-M\) (极大负值)。
- 求解该网络的最小费用流。若最优解中 \((t^*, s^*)\) 的流量等于总供给量,则原问题有可行解,且去掉辅助节点后的流即为初始可行流。
定理:若最小费用流问题中的所有容量 \(u_{ij}\) 和供需量 \(b_i\) 均为整数,则必然存在一个整数最优解。这意味着我们不需要使用复杂的整数规划方法,网络流算法自然能保证整数解(前提是数据整数)。
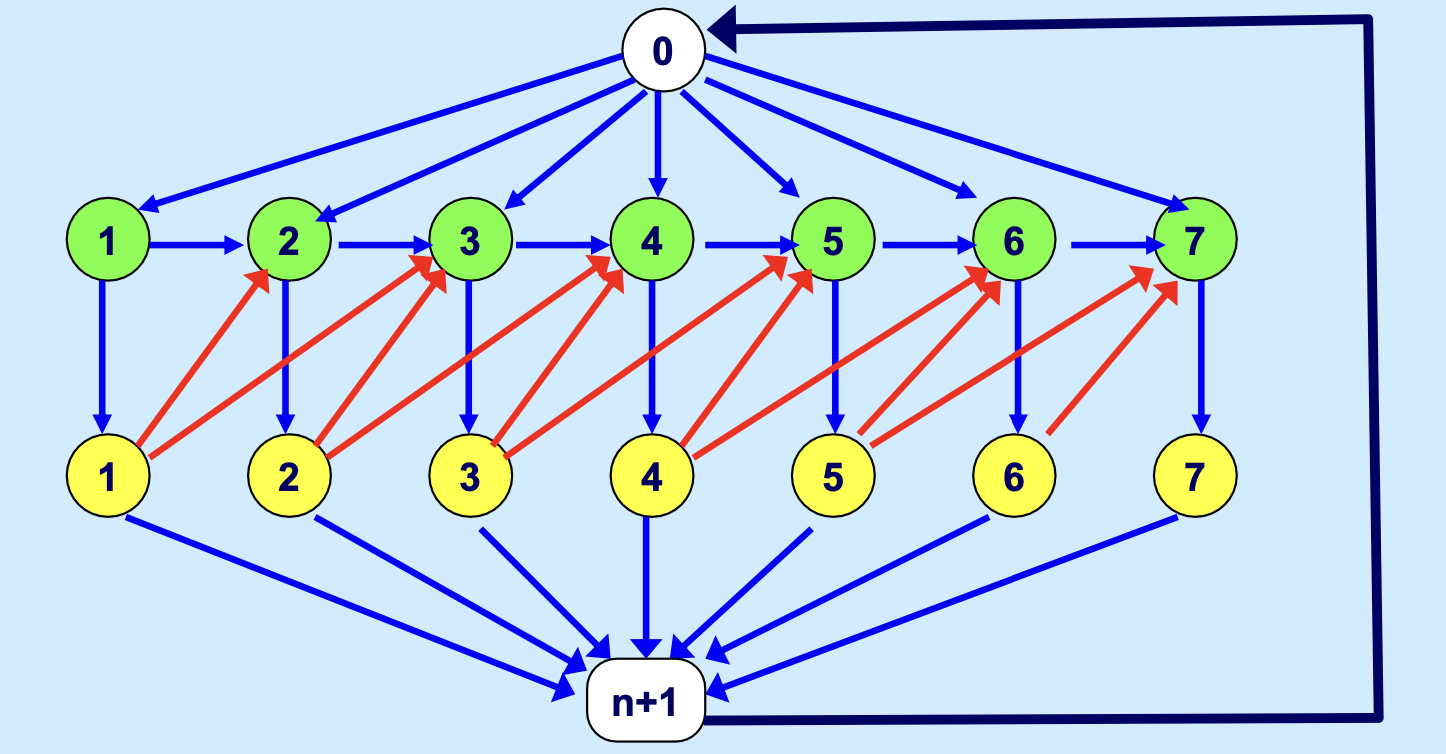
应用案例:The Caterer Problem (配餐员问题)⚓︎
时间展开网络 (Time-Expanded Network) 建模的经典案例。它将动态决策转化为静态网络流。
问题描述
- 需求:连续 \(n\) 天,第 \(j\) 天需要 \(d_j\) 块干净餐巾。
- 来源:
- 购买新餐巾:费用 \(a\)。
- 快洗 (1-day):当天脏,隔天干净,费用 \(c\)。
- 慢洗 (2-day):当天脏,隔两天干净,费用 \(b\)。
- 目标:最小化总成本。
网络建模
为了用最小费用流求解,我们需要将“时间”和“状态”转化为节点。
- 节点设计:
| 节点 | 解释 |
|---|---|
| 节点 \(j\) | 代表第 \(j\) 天可用的干净餐巾 (Clean napkins on day \(j\)) |
| 节点 \(j'\) | 代表第 \(j\) 天用完的脏餐巾 (Dirty napkins on day \(j\)) |
| 节点 \(0\) | 餐巾来源 (购买新餐巾) |
| 节点 \(n+1\) | 餐巾归宿 (不再清洗的脏餐巾) |
- 弧与费用设计:
- 购买:弧 \((0, j)\),费用 \(a\),容量 \(\infty\)。
- 使用 (满足需求):弧 \((j, j')\),费用 \(0\),流量固定为 \(d_j\) (可通过设置上下界均为 \(d_j\) 实现)。
- 清洗 (核心逻辑):
- 弧 \((j', j+1)\):1 天快洗,费用 \(c\)。
- 弧 \((j', j+2)\):2 天慢洗,费用 \(b\)。
- 库存:弧 \((j, j+1)\),干净餐巾留到明天,费用 \(0\) (或存储费)。
- 丢弃:弧 \((j', n+1)\),脏餐巾不再清洗,费用 \(0\)。
- 循环流:添加弧 \((n+1, 0)\),费用 \(0\),使网络形成循环流 (Circulation),便于求解。
这就能构成一个对应关系表,映射到最小费用流上:
| 最小费用流要素 | 在配餐员问题网络中的对应 | 说明 |
|---|---|---|
| 节点 | 每一天的两种状态节点(\(j\) 干净,\(j'\) 脏),外加虚拟源点 \(0\) 和汇点 \(n+1\) | 节点代表了“时间点”和“物品状态”的组合,这是时间展开网络的核心。 |
| 边 | 购买、使用、清洗(快/慢)、库存、丢弃、循环边 | 每一条边都代表一种可能的“操作”或“状态转移”,并带有相应的成本。 |
| 流量 \(x_{ij}\) | 每条边上的餐巾数量。例如,边 \((j, j')\) 上的流量就是第 \(j\) 天使用的餐巾数,必须等于 \(d_j\)。 | 流量是决策变量,代表了在各个操作间流转的餐巾数量。 |
| 费用 \(c_{ij}\) | 每条边对应的单位成本:购买费 \(a\),快洗费 \(c\),慢洗费 \(b\),其余为 \(0\)。 | 与最小费用流的目标——最小化总成本——完全一致。 |
| 节点供需 \(b_i\) | 此处体现为流量守恒。大部分节点是转运点(\(b_i=0\)),整个网络通过循环弧形成一个循环流。 | 这是最小费用流中“ Circulation ”问题的一个特例,即所有节点净流量为0。 |
- 建模意义: 这个问题展示了如何将多阶段决策问题转化为静态网络流问题。通过增加节点维度(时间 + 状态),将复杂的决策(洗还是不洗?快洗还是慢洗?)转化为网络上的路径选择。