图论算法:最大流与最小割⚓︎
约 9956 个字 93 行代码 10 张图片 预计阅读时间 34 分钟 总阅读量 次
照例,先上链接
- 首先强烈推荐 计算机系 jyy(yyds!)老师的B站教程。目前我所见的中文教程中,讲授最大流/最小割效果最好、信息含量足够大、信息密度足够高的。本篇笔记不过是对上述这个短短1h的授课视频的拙劣模仿。
- 笔记的第一个部分侧重于直觉,因此数学推导的部分不多,第二部分会从更加严谨的数学 + 算法角度进行展开。(20260315)
这个笔记会从几个部分展开。我很早以前就想写这部分内容了。没想到2024年都快结束了才堪堪开始。首先,你需要知道,最大流问题实际上可以认为是最小费用流的一个特例(可参考最小费用流的拓展。而最小费用流又可以视作一种线性规划问题的特例。我们会在后面简单讨论一下这个对偶问题的形式与含义)。
这是拟定的本笔记结构:
- 基础定义;以及从找路径到“割”;
- 如何从“找最多不重复路径”过渡到最大流;
- 为什么增广路径法在这个问题上是有效可行且正确的;
- 从最大流回归到线性规划
- 从线性规划回归到对偶,以及一种松弛的和紧凑的对偶形式;
现在我们开始。
S-T 割与路径存在的判定⚓︎
通过深度优先搜索和广度优先搜索,我们可以在一个给定的图中找到从节点 \(s\) 到节点 \(t\) 的路径。我们简单标记一下。图 \(G = (V,E)\), 起点 s,终点 t。一条路径 \([s, p_1, p_2, p_3, ... , t]\)。
现在,我们考虑这样一个问题。我们知道如果 \(s,t\) 之间能够找到路径,那么一定可以被 DFS/BFS 找到,那如果不存在路径呢?我们怎么证明的确不存在一个从 \(s\) 到 \(t\) 的路径呢?
我们可以考虑如下的情况:
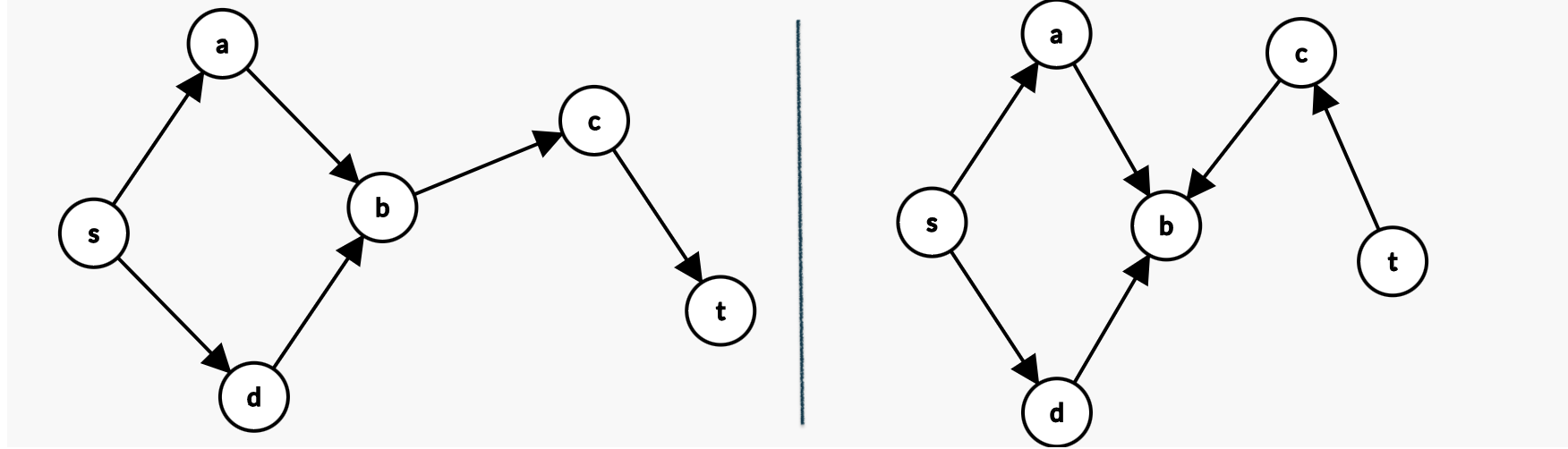
由瞪眼法。注意到,左图中,\(s\) 到 \(t\) 的路径是存在的,而右图中是不存在的。
我们可以下意识地想到一个笨方法。比如我们可以写出所有的从 \(s\) 到 \(t\) 的路径排列,而先不考虑路径中的边是否存在。比如:
\(s \rightarrow t\)
\(s \rightarrow a \rightarrow b \rightarrow t\)
\(s \rightarrow d \rightarrow c \rightarrow t\)
甚至 \(s \rightarrow d \rightarrow c \rightarrow a \rightarrow b \rightarrow t\)... 你可以想象出很多很多种排列。
如果存在一个路径,比如左图中的 \(s \rightarrow a \rightarrow b \rightarrow c \rightarrow t\),你会发现这个路径中的每一个边都出现在图的边中。(比如, \(s \rightarrow a, a \rightarrow b, b \rightarrow c, c \rightarrow t\),而如果在右图中,你会发现,任意一个排列中,都==至少有一个边不存在于原来的图中==。
但是,这个证明毫无疑问地太长了,我们不可能总是去求所有“边的排列”吧?
所以,我们需要回顾一下BFS,DFS实际上是在干什么。我们都是从起点出发,根据它能到达的点延伸“已访问到的节点”,这样不断地拓展节点集合,直到能访问到终点。Done!终止。
我们可以发现这里是有2个节点集合的,一个是“已访问到的”,一个是“没访问到的”。
现在,我们需要引入这部分一个非常重要的概念:有向图的 S-T 割。
S-T割:将图中所有节点分成两个集合\(S,T\),其中起点 \(s\) 必须处于 \(S\) 集合中,终点 \(t\) 必须处于集合 \(T\) 中。这就是一个“割”。我们定义割的大小就是 \(S\) 中的点向 \(T\) 中节点的连边的个数。
举个例子,上面左图中令 \(S = \{s, a, b, d \}, T = \{ c, t \}\)。这就是一个割。诶,此时边 \(b \rightarrow c\) 就是唯一一个从 \(S\) 通向 \(T\) 中节点的连边。这个割的大小就是 1.
再举个例子,上面右图中,令 \(S = \{s, a, b, d \}, T = \{ c, t \}\)。这就是一个割。此时你会发现,找不到一个边从 \(S\) 通往 \(T\)了。这个割的大小是 0.
这个时候你或许能够回答一个问题:割的作用是什么。
你或许发现了,上述DFS/BFS找不到路径的割就是一个大小为0的割。
或者这样理解。我们再回到那个“笨办法”:列举所有的排列,由于\(S-T\)割把所有节点分成2部分,起点一定在\(S\)中,终点一定在\(T\)中。假设,s-t之间真的存在一个路径,那么对于这个路径中的每一条边,都肯定会发生一次“一个边的相邻节点,一个处在 \(S\),一个处在 \(T\) 中”。
反过来,如果找到一个大小为0的割,就能说明这个路径不是通路了。因为它没法从你现在的 \(S\) 通到 \(T\) 中了,由于 T 中包含了终点t,你也就不可能抵达终点了。
总之,你可以用“割”来“证明路径是否存在”。你只要找到了一个大小为 0 的割,那么这两个点之间一定不存在路径。
最多有多少条不相交的路径?⚓︎
现在我们进入下一个具体的问题。给定图和起终点后,我们想知道图中有多少不相交的从 \(s\) 到 \(t\) 的路径。
这里补充一下“不相交”的定义是什么:如果两条路径没有共同的边,那么就认为这两条路径是不相交的。
如下左图中。你可以发现,无论路径: \(s \rightarrow a \rightarrow b \rightarrow c \rightarrow t\) 还是 \(s \rightarrow d \rightarrow b \rightarrow c \rightarrow t\),都需要经过 \(b \rightarrow c\) 这条边。所以这两条路径是相交的。只能找到一条不相交路径。这个 \(b \rightarrow c\) 就像是瓶颈(bottleneck)一样。
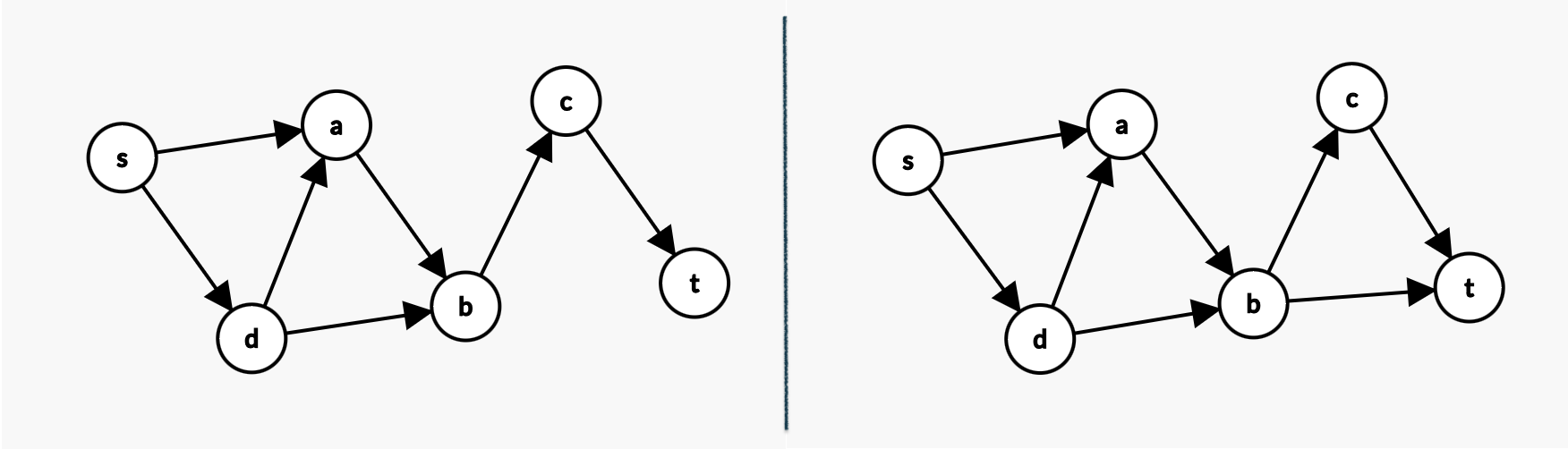
图2
反之,右图中,你可以找到 \(s \rightarrow a \rightarrow b \rightarrow c \rightarrow t\) 和 \(s \rightarrow a \rightarrow d \rightarrow b \rightarrow t\) 两条路径,是不重叠的。
好。这是个很小的图,如果说是个很大的图,找最大的不相交路径就显得有点太难了。我们不妨把这个最优化问题转化成一个“判定问题”。比如,我们想判断是否能找到 \(k\) 条从 \(s\) 到 \(t\) 的不相交路径呢?
上面我们判断能否找到从 \(s\) 到 \(t\) 的路径,其实就在解决 \(k = 1\) 的特殊情况。
如果 \(k = 2\) 呢?或者更大呢?
我们把目光转到“割”上来。你可以发现一个有意思的情况。
举个例子!
上面的图2的左图。我们能找到一个割 \(S = \{s, a, b, d \}, T = \{ c, t \}\)。这个割的大小是 1。此时,哪怕我们能在S集合中找到100种不同的路径,在T集合中也找到100个不同的路径,我终归只能通过 \(b\rightarrow c\) 这条边通往 \(T\) 集合中的点,就像一个独木桥!这个瓶颈(独木桥) 导致了,我最多只能找到1条不相交的路径。因为要想从\(S\)到\(T\),都只有这一条路,如果有2条或者更多路径,那一定会重复使用 \(b\rightarrow c\) 的。
再举例子,上面的图2的右图。我们能随手找到一个割 \(S = \{s, a, b, d \}, T = \{ c, t \}\)。这个割的大小是 2。这导致,我最多只能找到2条不相交的从 \(s\) 到 \(t\) 的路径(至多2座独木桥)。因为在这个割下,统共只有2条边能从 \(S\) 中的点通到 \(T\) 中的点。我们顶多把这两条边全站满了!现在你再想增加一个路径,它势必要使用这两个边中的任意一个,如果用了,那它肯定和现有的2个路径之一是相交的了。 所以,至多只有2条路径。
这里还要补充一句,如果你随手找到了一个大小为 \(2\),或者更大的割,不代表这个图就真的存在一个路径了!你可以参考图1的左图。我们的割 \(S = \{s\}, T = \{ a, b, d , c, t \}\) 的大小是2,但是这个图并不存在\(s-t\)路径!
所以,我们总结一下。如果我们随手找呀找,在图里找到一个大小为 \(l\) 的 S-T 割。那么至多只有 \(l\) 个不重复的路径。割的大小实际上提供了一个“上界”。我们先记住这个结论。
现在我们回到那个 “找不相交路径” 的问题上。
想一想,让你用手算来找不相交的路径,你会怎么做?
你一般会先找到一个路径,然后剔去这路径上所有的边,对残余的图继续寻找。也就是:
- 用DFS/BFS在 \(G(V,E)\) 中找到一条路径 \(P\)
如果找不到路径,结束!
- \(G \leftarrow (V, E \setminus P)\),循环。
比如对于图二的右图:
我们一眼瞪出来: \(s \rightarrow a \rightarrow b \rightarrow c \rightarrow t\) 和 \(s \rightarrow a \rightarrow d \rightarrow b \rightarrow t\) 两条路径,是不重叠的。
但是如果我们一眼瞪出来了 \(s \rightarrow d \rightarrow a \rightarrow b \rightarrow c \rightarrow t\),你堪堪把这些边删掉,你的残余网络就变成:
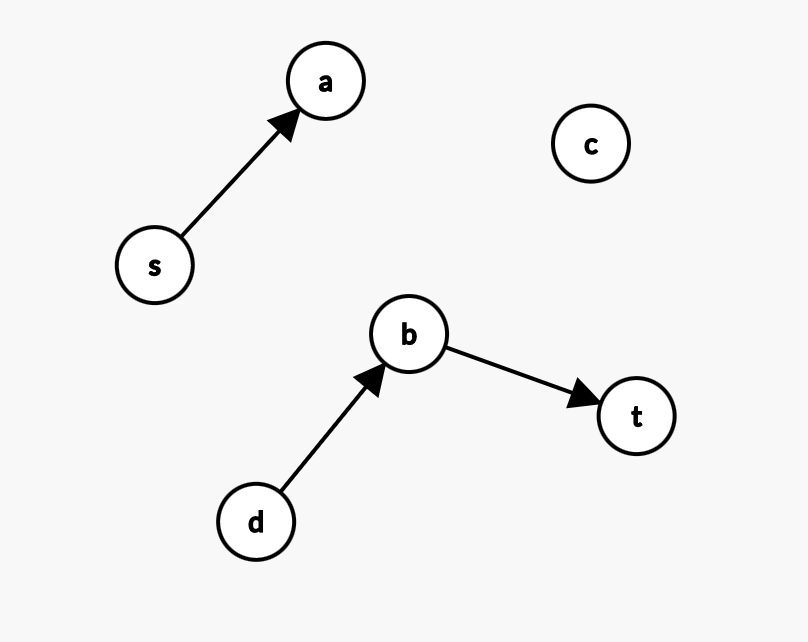 ,
,
图3
你就找不到第二条不相交路线了!
有没有一种办法总是能尽可能多地找到不相交路径,哪怕是我们选了“错”的路的情况下。也就是,我们希望从图4的左图(只有一个不相交路径),改成图4右图的情况呢?
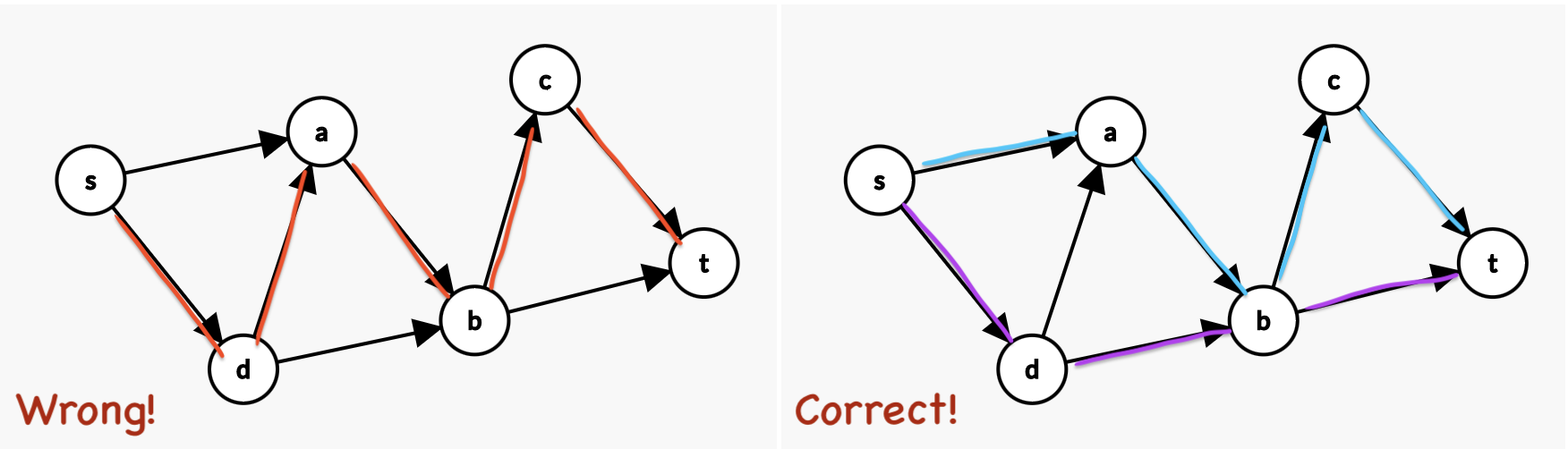
图4
我们先说做法,最后会证明为什么这种做法是正确的纠错。
假设我们先选中了 \(s \rightarrow d \rightarrow a \rightarrow b \rightarrow c \rightarrow t\)。我们已经找到1个不相交路径了。我们此时把这个路径中所有的边全部反向。也就是图变成如下左图的情况:
现在,我们在这个变化过了的图里继续寻找,能不能从\(s\)到\(t\)。
很显然是能找到的,如下右图。这相当于我们多找到了1个不相交路径。也就是2条不相交路径了。
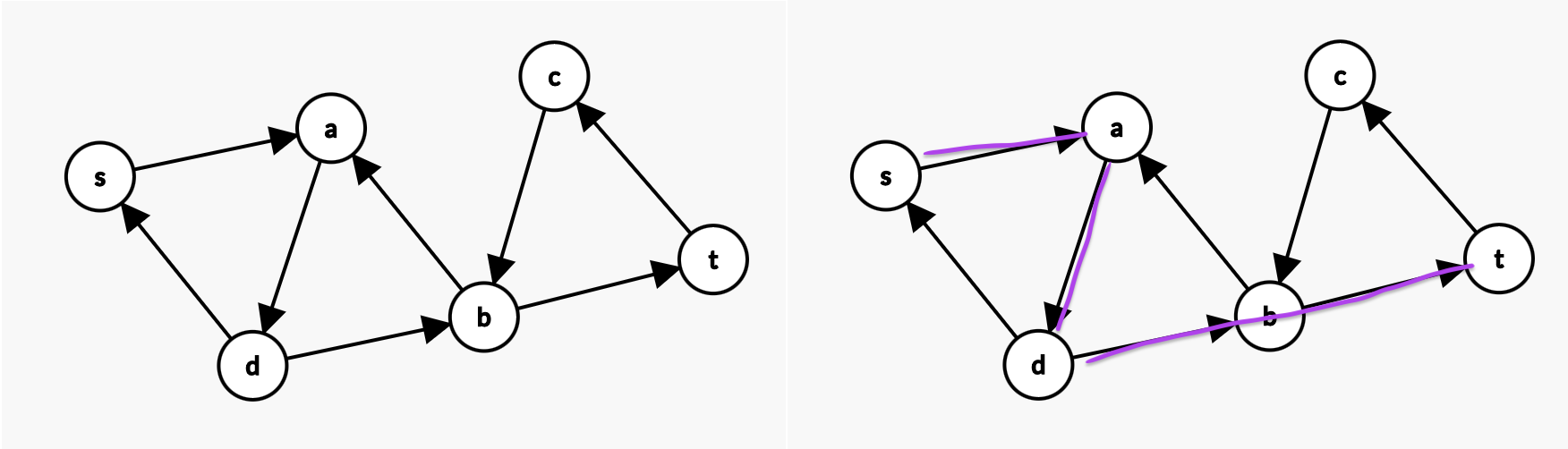
此时我们再把这次找到的这个路径的所有边反向,如下右图所示。
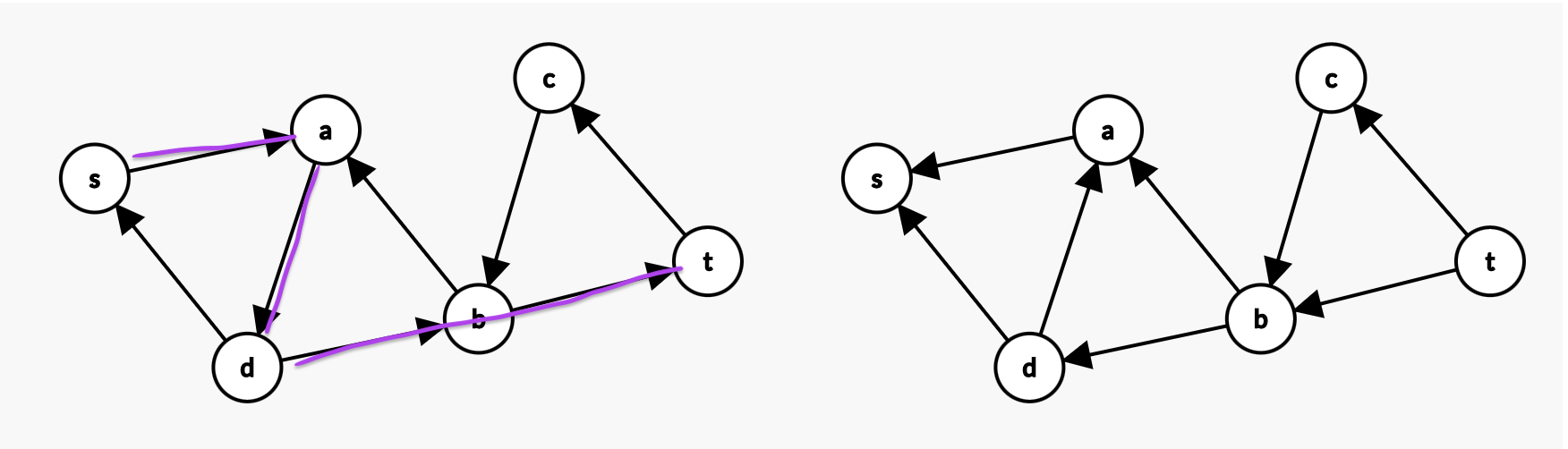
好了,这下彻底找不到可以从\(s\)到\(t\)的路径了。如果你注意力比较好,你会发现我们这么一番折腾,最开始找的那个“错”路径的 \(d \rightarrow a\) 被纠正回来了,变成了原来图中的样子,因为找到2个不相交路径的解中,并不需要这条多余的边。我们完成了纠错。
接下来是我最喜欢的一个环节。
我们想知道,为什么在反向后的残留网络上找到一个路径,就一定能找到一个新的不相交路径呢?
可以用上图进行可视化。证明完毕。
(还是解释一下吧)
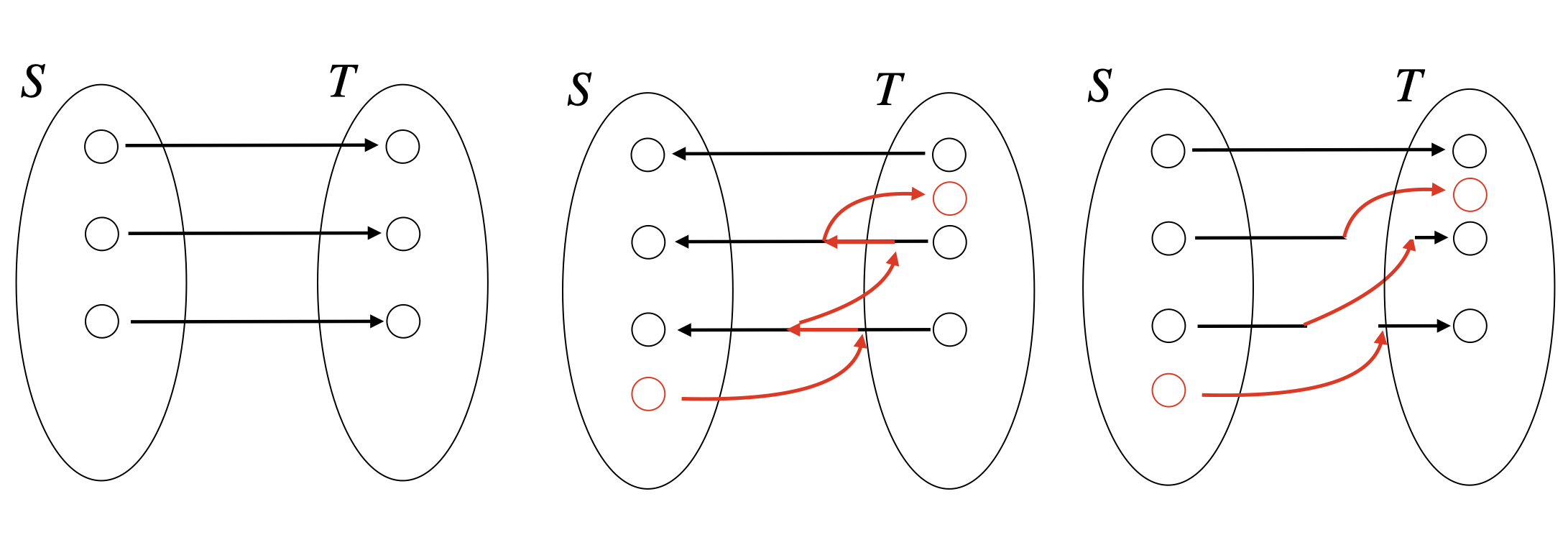
我们一开始有\(k\) (图中\(k=3\)条路径),从 \(s\) 到 \(t\)。现在我们通过反转原来的所有路径的边,成了第二个的情况,也就是中间的图。我们在这个图中,找到了一个新的路径。这个路径==可能经过某些反转后的边==(比如和黑线重叠的红线),也可能包含某些原先就有的、尚未被经过的边(比如不和黑线重叠的那部分红色的边),总之,就像中间这个图一样歪歪扭扭,但是毕竟找到了这样一条路径。
现在,我们把“经过的反转的那些边”擦除,仅仅保留没有经过的,但是又被反转了的边,这次给它扭正过来,我们绝对可以画出右图所示的这样一条路径。这就是为什么“如果在反向后的残留网络上能够找到一个路径,那么就一定能找到一个新的不相交路径。”
我太爱这个无字证明了。所以我一定要亲手把这个图画下来。
我第一次看jyy的讲解看到这部分的时候真的拍桌直呼:太牛了吧...
总结一下
上述操作的细节是:
- 对于已经走过的边,允许它们“推一段”回去;
- 对于没走过的边,允许继续走;
- 以此重新寻找路径;
这实际就是Ford-Fulkerson 算法最经典的“反转路径、形成增广路径(augmenting path)”操作。虽然我们目前还没有提到“最大流”。
我们可以用上面的方法,每次找到新路径就反转,直到不能再找到路径为止,这样一直操作,直到残余网络中找不到一个 \(s\) 到 \(t\) 的路径了,终止。
你可能会问,我们是否真的求的得了最大数量的不相交路径呢?
答案是肯定的。Proof:
假设最大不相交路径的数量为 \(k\)。现在我们找到了 \(m\) 条不同的路径,肯定有 \(m \leq k\)。此时,我们一定可以找到一个大小为 \(m\) 的割。为什么?
因为我们可以直接考虑这样一个割: \(S = \{ s\}\), \(T\) 为除了\(s\)外其他所有节点的集合。因为我们有 \(m\) 个不相交路径了,那么一定有 m 个不同的边从 \(s\) 流出,也就是从 \(S\) 流出到\(T\) 中。这就是一个大小为 \(m\)的割。
如果你还记得,割的大小决定了“不相交路径的上界”。 那么,我们一定有 \(k \leq m\)。
夹逼准则,两头堵!
于是:
\(m \leq k \leq m\)
所以我们这时候得到的路径数 \(m\),就是我们想要找的那个 \(k\)。那个“最大数量的不相交路径”。
再换句话说,我们整个图里,所有的割中,最小割的大小,就是不相交路径的数量。
原始的线性规划形式及建模⚓︎
现在,我们终于可以从“找不相交路径的最大数量”推广到“有权值的图”上来,就得到了最大流问题。
比如,如果我们假设,下图右图 中,从s到a点,权重是20,那么我们就看作这两个点之间有20条不同边,其权重都是1。以此类推。此时我们同样可以求从 \(s\) 到 \(t\) 的不相交路径的最大数量,依然是成立的。一个简单的例子如下。

我们可以把每个边的权重想象成“容量”,把每个路径流过这个边的权重想成“流量”,也就是有多少条流量可以经过这一条边,还不超过容量限制。如果说在加权图中,这个边的权重是20,那么最多有20条路径(更准确说,是20个大小的流量)可以流经这个边,如果权重是283.21,说明最多有283.21个大小的流量可以选择这个边。以此类推。
不妨写出所有从 s 到 t 的路径都写出来。比如:
\(P_1 = s \rightarrow a \rightarrow b \rightarrow t\)
\(P_2 = s \rightarrow c \rightarrow d \rightarrow t\)
\(P_3 = s \rightarrow c \rightarrow d \rightarrow b \rightarrow t\)
\(P_4 = s \rightarrow a \rightarrow c \rightarrow d \rightarrow b \rightarrow t\) ...
此时如果我们希望流量尽可能的大,其实也就是选择尽可能多的路径,同时不违背容量限制。
那么我们可以给每个路径设置一个流量。
比如,我们设 \(P_1\) 的流量为 \(x_1\),以此类推。
\(\max x_1 + x_2 + ... + x_p\),这里的 \(p\) 是所有的 \(s\) 到 \(t\) 的路径数。注意,这种建模方式中的路径数有指数多个,因此是一个很冗余繁琐的模型。但是它对于我们理解很有帮助。后面我们会提到更加紧凑的数学模型。
\[\begin{aligned}
\begin{cases}
\begin{align}
x_1 + x_4 + ... + &\leq 20 \\
x_2 + x_3 + ... &\leq 10 \\
... \\
x_i \geq 0,\forall i
\end{align}
\end{cases}
\end{aligned}\]
这里的约束 (1),含义就是,所有包含了 \(s \rightarrow a\) 这条边的路径,其流量之和不能超过20。同理,约束 (2) 的含义就是,所有包含了 \(s \rightarrow c\) 这条边的路径,其流量之和不能超过10。以此类推。
上面也提到,决策变量有指数多个,很明显是很差劲的,但是为什么要专门提出来呢?因为这是网络流问题在优化语言描述下,最原始的形式。 它很基本、很原始地刻画了在容量限制下,对路径进行叠加,以找到尽可能多地从 \(s\) 到 \(t\) 的不相交路径 这样一个过程。
基于路径模型的完整形式
设 \(P\) 是从起点 \(s\) 到终点 \(t\) 的所有路径。\(x_i\) 是路径 \(i \in P\) 的流量。是一个连续型变量。我们用参数 \(a_{ik}\) 表示路径 \(i \in P\) 是否经过边 \(k\),如果是,则为1,否则为0。记图中所有的边集合为 \(E\),其中边 \(k\) 的容量限制是 \(c_k\)。那么,我们可以写出如下线性规划模型:
\[\max \sum_{i \in P} x_i\]
s.t.
\[\begin{aligned}
\begin{cases}
\sum_{i \in P} a_{ik} x_i \leq c_k,\forall k \in E \\
\end{cases}
\end{aligned}\]
现在,我们终于要回到运筹学课本上讲述的“网络流”的定义了。其实,那只不过是考虑了环流等更多情况下,该问题的一个简化(不再以路径为决策变量进行建模了)。
更加紧凑(经典)的网络流线性规划的建模⚓︎
如果不再以路径为决策变量进行建模,而是直接关注“每个边究竟应该流多少流量”这个核心问题,我们该怎么建模呢?(这部分主要就是抄书了)
同样以上图中的网络为例。我们记边 \((i,j)\) 的流量为 \(x_{ij}\)。你首先需要观察到一个很重要很重要的性质:
流平衡
什么意思呢,就是除开了 \(s\) 和 \(t\) 之外,其他所有节点,其流入的流量一定等于流出的。为什么呢?因为,除了 \(s\) 和 \(t\) 之外,其他所有节点,都是中间节点,既不是起点,也不是终点,我们不会在中间节点有流量的损失(否则我们就一定可以通过把这个流量补上,找到一个更大的流了呀!),我们也不会在中间节点有流量的增加(中间节点不会平白无故生产流量!)。
具体而言,以 \(a\) 节点为例, \(x_{sa} = x_{ab} + x_{ac}\), 以c节点为例,\(x_{sc} + x_{ac} + x_{bc} = x_{cd}\)。以此类推。有多少个节点(除了起终点),就有多少个流平衡!
我们把完整的、基于网络流而不是基于路径的、紧凑的建模写在这里。
给定图 \(G = (V,E)\) 以及起点 \(s\),终点 \(t\)。设 \(x_{ij}\) 是边 \((i,j) \in E\) 上的流量。是一个连续型变量。我们用集合 \(\Omega^+(i)\) 表示流入节点 \(i \in V\) 的节点集合,用集合 \(\Omega^-(i)\) 表示流出节点 \(i \in V\) 的节点集合。我们用 \(c(i,j)\) 表示边 \((i,j)\) 的容量。那么,我们可以写出如下线性规划模型:
\[\max \sum_{j \in \Omega^-(s)} x_{sj}\]
s.t.
\[\begin{aligned}
\begin{cases}
\begin{align}
\sum_{j \in \Omega^+(i)} x_{ij} = \sum_{j \in \Omega^-(i)} x_{ji},\forall i \in V \setminus \{s,t\} \qquad \\
x_{ij} \leq c(i,j), \forall (i, j) \in E \qquad \\
x_{ij} \geq 0, \forall (i, j) \in E \qquad
\end{align}
\end{cases}
\end{aligned}\]
对上述两个线性规划的对偶问题的整理⚓︎
做运筹相关整理,一直想对所有经典问题的对偶情况进行一些粗浅的分析。我们开始吧。
基于路径的LP的对偶⚓︎
我们先讨论那个笨拙的、基于路径的线性规划问题。事实上,从这个笨拙的建模开始,比从那个精简后的线性规划模型入手,更容易理解最大流对偶的本质。
不言而喻地,对偶问题的决策变量是从原问题的约束条件入手的。 原问题的约束条件,对应的是每个边的容量限制。所以记图中有 \(|E|\) 条边,我们的对偶问题就有 \(|E|\) 个决策变量。记 \(y_k\)。如果你想具体一点,可以逐一罗列地写成:\(y_{sa}, y_{ab}, y_{bc}\) 等以此类推的形式。同样地,我们应该注意到,设原问题有 \(|M|\) 个决策变量,那么对偶问题就对应了 \(|M|\) 个约束条件。(注意这有指数多个约束,但是无妨,我们不会去解这个问题的)
Furthermore,原问题的每一个决策变量都对应了一个(对偶问题的)约束,因为这个决策变量是针对“某条路径”的,所以在对偶问题的语境下,这个约束也是针对“某条路径”而给出的,它的右端项始终为1。但是系数矩阵 ...
记得我们之前有 “用参数 \(a_{ik}\) 表示路径 \(i \in P\) 是否经过边 \(k\)”,那么在对偶语境下,倒过来,就是:边 \(k\) 是否被路径 \(i\) 所经过——其表示依然可以用 \(a_{ik}\) 这个参数!
我们先写好对偶问题的目标函数:\(\min \sum_{k \in E} c_k y_k\)。
我们再写约束条件:
\[\begin{aligned}
\begin{cases}
\begin{align}
\sum_{k \in E} a_{ik} y_k \geq 1,\forall i \in P \qquad \\
y_k \geq 0, \forall k \in E \qquad
\end{align}
\end{cases}
\end{aligned}\]
防止理解不了这个约束,我还是拿上图的例子来讲:
对第一个路径 \(s \rightarrow a \rightarrow b \rightarrow t\),我们写出来的第一个约束就是: \(y_{s,a} + y_{a,b} + y_{b,t} \geq 1\) 以此类推。别忘了, \(a\) 参数,不管下标如何,要么是0,要么是1.
那么回过头来看这个对偶问题,你做的事情实际上是,在每个边都已赋予一个权重的情况下,要求一个 \(y_k\)。我们假设令 \(y_k \in \{ 0, 1\}\),就是要在所有的路径(路径反正是由边组成的,每个边有其权重)中,选一些边出来,使得选出来的边,其能够覆盖所有的路径(这也就是为什么,有路径个约束,同时约束是 \(\geq 1\))的前提下,还能使得权重最小。
而,如果我们把 “覆盖所有的路径” 换一种思路来思考...一些边覆盖了所有的路径,不就意味着,拿掉这些边后,我们找到了一个种办法,分开了起点和终点 .... 不就是 ... 割?!!
当然了,严格来说,上面这个表达式,就是最小割问题的一个线性松弛 (因为我们 \(y_k\) 毕竟还是 continous的嘛.)针对这些细节的表述,你可以参考 这个链接 给出的数学证明。
如果你的直觉足够强,你可以想象成下图所示,左侧每个长线都表示一个从 \(s\) 到 \(t\) 的路径,因为它们由不同的边组成,所以每一段的权重各有不同(以不同颜色表示)。而我们的最终解就是下面右图所示的那样。
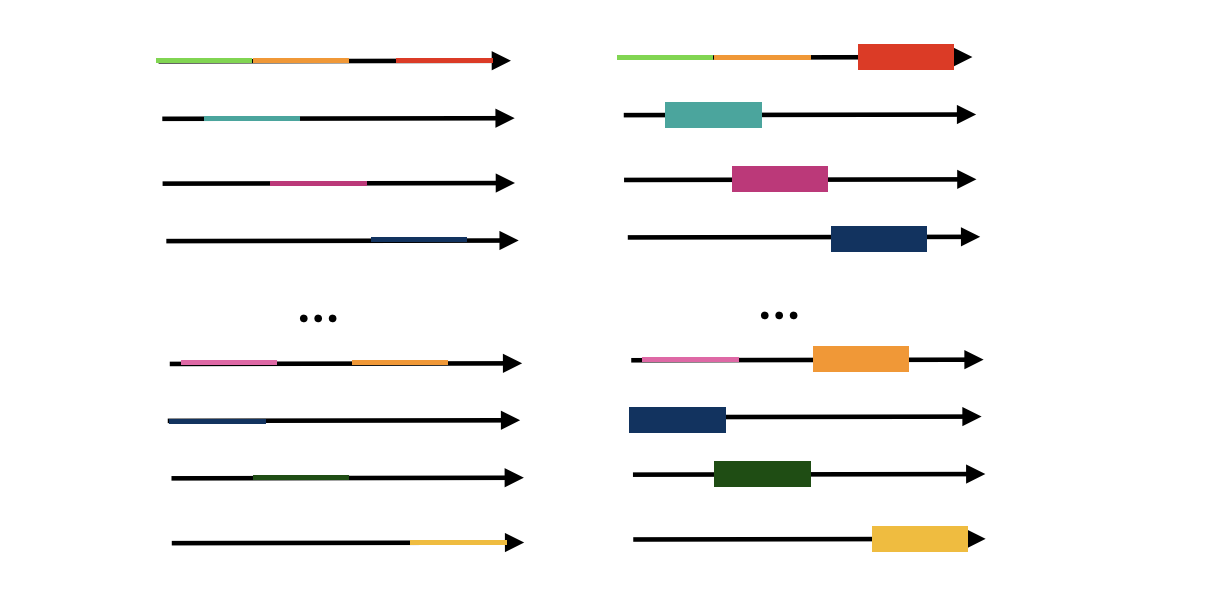
这些选出来的边,也就构成了一个最小的割。 这就是为什么,在本质上,最大流和最小割是互为对偶,又冥冥之中互有联系的原因。
基于紧凑的网络流模型的对偶⚓︎
现在,是时候跳出上面基于路径的对偶,转而看一看我们精简后的,你最经常见到的网络流模型的对偶了。
在链接(上面已经给出过了) 中,我们知道,可以证明这个路径的建模方式与最大流的问题是完全等价的。某种意义上,我们可以得到一种启示,即,我们对网络流模型的建模,和上面给出的这个对偶,也有千丝万缕的关系。我们开始。
首先我们知道,对偶变量一定对应着原问题的某个约束,而网络流模型有2组约束:流平衡、容量约束。同时,我们知道,网络流的流平衡约束的数量,等于节点数 - 2 (因为头尾节点没有);而网络流的容量约束的数量,等于图中边的数量。但,你同样应该注意到,对于流平衡约束,移项后,右端项是0,也就是这部分约束的对偶变量不会出现在对偶问题的目标函数中。
我们开始手撕。
我们定义对偶变量 \(y_{(u,v)}\),也就是边 \((u,v)\) 在原问题的容量约束所对应的那个对偶变量;我们同样定义对偶变量 \(y_u\),也就是节点 \(u\) 在原问题的流平衡约束所对应的那个对偶变量。
\[\min \sum_{(u,v) \in E} c(u,v) y_{u,v}\]
\[\begin{aligned}
\begin{cases}
\begin{align}
y_v + y_{s,v} \geq 1 \qquad \forall v : (s, v) \in E \qquad \\
y_v - y_u + y_{u,v} \geq 0 \qquad \forall (u,v) \in E, u \neq s, v \neq t \qquad \\
-y_u + y_{u,t} \geq 0, \qquad \forall u: (u,t) \in E \qquad
\end{align}
\end{cases}
\end{aligned}\]
这个看起来确实很 Mysterious ... 因为看起来怪怪的。这是因为最大流里有容量约束导致的。
第一组,针对的是原问题中从起点出发的所有路径,也就是原问题决策变量的对应路径;
第二组,针对的是原问题中,所有不从起点出发,也不到达终点的路径;
第三组,针对的是原问题中,所有到达终点的路径;
至于为什么前面的系数矩阵有正有负,要写成这种形式(这似乎已经尽可能简洁了!)可以留作课后习题。提示一下,可以从节点-边关系矩阵入手。 原问题如果只看流平衡矩阵,行数就是节点数,列数就是边数。而一行中是可以有很多1,-1的,但是一列只有一个1和一个-1,分别表示出点和入点。
如果再把容量约束拴到这个矩阵下面,会发现,这个容量约束的矩阵好巧不巧哦,正好是个单位阵!太整齐了吧!(想象下,因为容量是要限制所有边的,所以 ... )
这个“整齐”带来的后果是,转置到对偶问题的系数矩阵之后,每一行恰好一个。这也就解释了为什么,偏偏对偶问题的每一个约束都有一个 \(y_{s,v} / y_{u,v} / y_{u,t}\) 。知道了这一点,你可以试着把这几项先捂住不看,只看前面的,再来理解前面的正负关系,就容易多了。
(别忘了右端项!)
这部分拖了几乎一年,在2025.02.14终于完成了内容整合。不容易!
更加学院派的 Ford-Fulkerson 算法整理⚓︎
以下是基于 MIT 讲义内容,为你现有的 Chapter7_2.md 笔记补充的严谨学院派分析部分。你可以直接将以下内容接在你原有笔记的末尾(即 Ford-Fulkerson 算法 标题之后)。
这部分内容侧重于形式化定义、算法伪代码、正确性证明逻辑以及复杂度分析,弥补了原有笔记在算法落地和理论严谨性上的不足。
Ford-Fulkerson 算法:形式化描述与复杂度分析⚓︎
基于前文的直观理解,本节我们将给出 Ford-Fulkerson 算法,前置的残差网络理论、形式化定义、伪代码描述,并基于再次证明其正确性(最大流最小割定理)及有限性。同时分析其时间复杂度缺陷及改进方向。
The Residual Network⚓︎
为了在算法过程中动态地寻找增广路径并允许“撤销”之前的流量决策,我们需要引入残差网络 (Residual Network) 的概念。
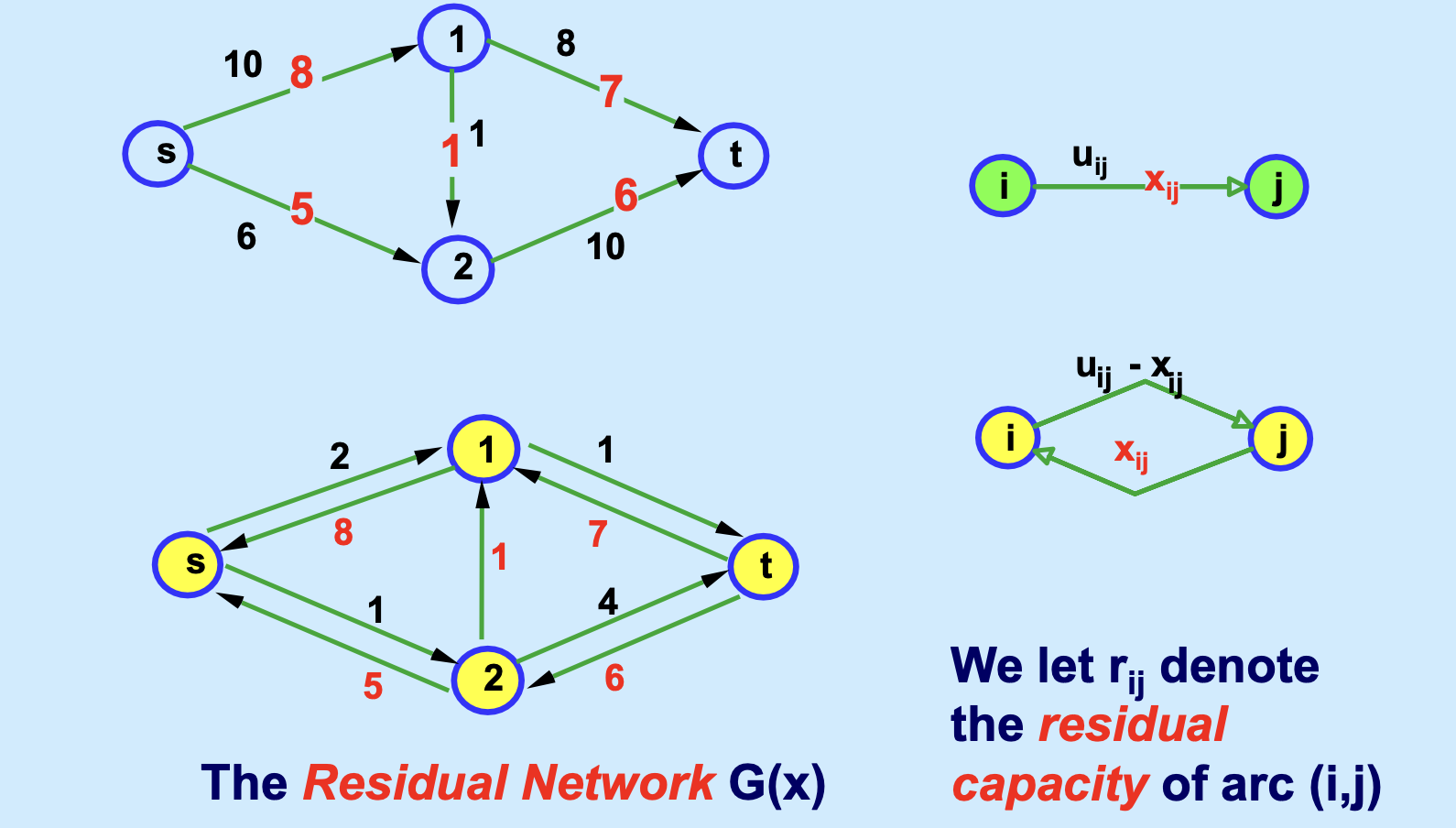
给定网络 \(G=(N, A)\),容量 \(u_{ij}\),当前可行流 \(x\)。对于每条弧 \((i, j) \in A\),定义其残差容量 (Residual Capacity) \(r_{ij}\) 为:
\[
r_{ij} = \begin{cases}
u_{ij} - x_{ij} & \text{若 } (i, j) \in A \text{ (前向弧)} \\
x_{ji} & \text{若 } (j, i) \in A \text{ (后向弧)}
\end{cases}
\]
残差网络 \(G(x)\) 是由所有 \(r_{ij} > 0\) 的弧组成的网络。 * 物理意义:\(r_{ij}\) 表示在弧 \((i, j)\) 上还能增加多少流量;后向弧的残差容量表示可以“退回”多少流量。下图,中黑色的部分就是前向弧,红色的,一方面代表当前可行流量,一方面也能标注后向弧的量(可以回退的)。
Augmenting Path Theorem⚓︎
增广路径定理
一个可行流 \(x\) 是最大流,当且仅当残差网络 \(G(x)\) 中不存在从源点 \(s\) 到汇点 \(t\) 的有向路径(即增广路径)。
这个的直观证明见前一部分。
- 充分性:如果存在增广路径,我们可以沿该路径增加流量,故当前流不是最大流。
- 必要性:如果不存在增广路径,则当前流为最大流(证明见下文最大流最小割定理)。
Ford-Fulkerson Algorithm⚓︎
基于增广路径定理,Ford-Fulkerson 算法通过不断寻找增广路径来迭代更新流。
Algorithm Ford-Fulkerson:
Input: Network G=(N, A), capacities u, source s, sink t
Output: Maximum flow x
1. Initialization:
x := 0 (所有弧流量初始化为 0)
Construct residual network G(x)
2. Augmentation Loop:
while there exists a directed path P from s to t in G(x) do
// 计算路径 P 的残差容量(瓶颈容量)
δ := min { r_ij : (i, j) ∈ P }
// 沿路径增广
for each arc (i, j) in P do
if (i, j) is a forward arc in G then
x_ij := x_ij + δ
else // (i, j) is a backward arc corresponding to (j, i) in G
x_ji := x_ji - δ
// 更新残差网络 G(x)
Update residual capacities r_ij accordingly
3. Termination:
return x
Integrality Lemma
如果所有容量 \(u_{ij}\) 均为整数,则 Ford-Fulkerson 算法在每一步迭代中保持所有流量 \(x_{ij}\) 和残差容量 \(r_{ij}\) 为整数。
Trivial:初始时 \(x=0\) 为整数。每次增广量 \(\delta\) 是路径上残差容量的最小值,故 \(\delta\) 为整数。更新操作仅涉及整数加减,故整数性保持不变。
Finiteness
若容量均为有限整数,Ford-Fulkerson 算法必在有限步内终止。
- 证明:
- 由整数性引理,每次增广量 \(\delta \geq 1\)。
- 每次增广后,从源点 \(s\) 流出的总流量至少增加 1。
- 最大流值 \(v^*\) 有上界(例如所有出弧容量之和)。
- 因此,增广次数最多为 \(O(v^*)\) 或 \(O(nU)\)(其中 \(U\) 为最大容量)。
无理数容量的陷阱
如果容量为无理数,Ford-Fulkerson 算法可能无法终止,甚至收敛到错误的流值(参见 Lec 09 中的反例构造)。但在实际应用中容量通常为整数或有理数。
Max-Flow Min-Cut Theorem⚓︎
这是网络流理论的核心对偶定理。
最大流最小割定理的严格证明
在任何网络中,从 \(s\) 到 \(t\) 的最大流值等于最小 \(s-t\) 割的容量。 $$ \max { v } = \min { CAP(S, T) } $$
设 \(x^*\) 为算法终止时的流(即无增广路径),\(S^* = \{ j : s \to j \text{ 在 } G(x^*) \text{ 中可达} \}\),\(T^* = N \setminus S^*\)。
- 引理 1:对于任意流 \(x\) 和任意割 \((S, T)\),流出 \(s\) 的净流量等于穿过割的净流量 \(F_x(S, T)\)。
- 证明:对 \(S \setminus \{s\}\) 中所有节点应用流量守恒约束求和即可得。
- 引理 2:对于任意流 \(x\) 和任意割 \((S, T)\),\(F_x(S, T) \leq CAP(S, T)\)。
- 证明:\(F_x(S, T) = \sum_{i \in S, j \in T} x_{ij} - \sum_{i \in T, j \in S} x_{ji}\)。由于 \(x_{ij} \leq u_{ij}\) 且 \(x_{ji} \geq 0\),故得证。
- 引理 3:对于算法终止时的流 \(x^*\) 和构造的割 \((S^*, T^*)\),\(F_{x^*}(S^*, T^*) = CAP(S^*, T^*)\)。
- 证明:由于 \(G(x^*)\) 中不存在从 \(S^*\) 到 \(T^*\) 的弧(否则 \(T^*\) 中的点应属于 \(S^*\)),这意味着对于所有跨越割的弧 \((i, j)\)(\(i \in S^*, j \in T^*\)),必有 \(x_{ij} = u_{ij}\) 且 \(x_{ji} = 0\)。因此净流量等于容量。
综上:
\[ \text{Max Flow } v^* = F_{x^*}(S^*, T^*) = CAP(S^*, T^*) \geq \text{Min Cut} \]
又因为任意流 \(\leq\) 任意割,故 \(v^*\) 即为最大流,\((S^*, T^*)\) 即为最小割。
Complexity & Improvements⚓︎
虽然 Ford-Fulkerson 算法逻辑简单,但其复杂度依赖于容量值 \(U\),属于伪多项式时间 (Pseudo-polynomial time)。
| 算法变体 | 增广路径选择策略 | 增广次数上限 | 总时间复杂度 | 备注 |
|---|---|---|---|---|
| Ford-Fulkerson | 任意路径 (DFS) | \(O(nU)\) 或 \(O(v^*)\) | \(O(m \cdot v^*)\) | 容量大时效率极低 |
| Edmonds-Karp (Lec 10) | 最短增广路径 (BFS) | \(O(nm)\) | \(O(n^2 m)\) | 多项式时间,与容量无关 |
| Capacity Scaling (Lec 12) | 容量缩放 | \(O(m \log U)\) | \(O(nm \log U)\) | 适合大容量网络 |
| Preflow-Push (Lec 11) | 预流推进 (无路径) | - | \(O(n^2 m)\) 或 \(O(n^3)\) | 实际效率通常最高 |
Edmonds-Karp 算法:最短增广路⚓︎
算法背景
Ford-Fulkerson 算法的最大缺陷在于增广路径的选择是任意的。如果选择不当(如 Lec 09 中的坏例子),算法可能需要指数次增广。Edmonds-Karp 算法 是 Ford-Fulkerson 算法的一种具体实现,它规定:每次始终选择残差网络中边数最少的增广路径(即最短路径)。
Edmonds-Karp 算法通过 BFS (广度优先搜索) 来寻找增广路径。 * 策略:在残差网络 \(G(x)\) 中,寻找从 \(s\) 到 \(t\) 的最短路径(以边数衡量距离)。 * 目的:保证距离标号单调不减,从而限制增广次数的上界,使算法在多项式时间内终止。
伪代码如下:
Algorithm Edmonds-Karp:
Input: Network G=(N, A), capacities u, source s, sink t
Output: Maximum flow x
1. Initialization:
x := 0 (所有弧流量初始化为 0)
2. Main Loop:
while True do
// 使用 BFS 寻找最短增广路径
parent := array of size |N| initialized to NULL
queue := [s]
parent[s] := s
found := False
while queue is not empty do
u := queue.pop()
if u == t then
found := True
break
for each vertex v adjacent to u in residual network G(x) do
if parent[v] == NULL and residual_capacity(u, v) > 0 then
parent[v] := u
queue.push(v)
if not found then
break // 找不到增广路,算法终止
// 路径回溯与流量增广
path_flow := infinity
curr := t
while curr != s do
prev := parent[curr]
path_flow := min(path_flow, residual_capacity(prev, curr))
curr := prev
// 更新残差网络
curr := t
while curr != s do
prev := parent[curr]
x[prev][curr] := x[prev][curr] + path_flow
x[curr][prev] := x[curr][prev] - path_flow // 反向边
curr := prev
3. Termination:
return x
Edmonds-Karp 算法的关键在于证明其增广次数是有限的,且与容量值 \(U\) 无关。首先引入了 Distance Labels,便于在反向的时候能找到“最短路径”。
Distance Labels
定义 \(d(i)\) 为残差网络 \(G(x)\) 中从源点 \(s\) 到节点 \(i\) 的最短路径长度(边数)。 * 性质 1:对于残差网络中的任意弧 \((i, j)\),满足 \(d(j) \leq d(i) + 1\)。 * 性质 2:增广路径 \(P\) 上的每一条弧 \((i, j)\) 都满足 \(d(j) = d(i) + 1\)(即都是“有效弧”)。
- 引理 1:距离标号单调不减
-
随着算法的进行,每个节点 \(i\) 的距离标号 \(d(i)\) 是非递减的。
- 证明思路:增广操作可能会引入反向边,但反向边 \((j, i)\) 的加入意味着 \(d(i) = d(j) + 1\),这不会减少 \(s\) 到其他节点的最短距离。删除饱和边只会增加距离或保持不变。
- 引理 2:每条弧成为瓶颈的次数有限
-
每条弧 \((i, j)\) 成为增广路径上的瓶颈弧 (Critical Arc)(即被饱和的弧)的次数最多为 \(n/2\) 次。
- 证明思路:
- 当 \((i, j)\) 被饱和时,它在残差网络中消失,此时 \(d(j) = d(i) + 1\)。
- 要使 \((i, j)\) 再次出现在残差网络中,必须沿反向边 \((j, i)\) 推流,这要求 \(d(i) = d(j) + 1\)。
- 结合距离标号单调不减,再次饱和时 \(d(i)\) 至少增加了 2。
- 因为 \(d(i) < n\),所以每条弧最多饱和 \(n/2\) 次。
- 证明思路:
Edmonds-Karp 复杂度定理
- 增广次数:最多为 \(O(nm)\) 次。(共有 \(m\) 条弧,每条弧最多成为瓶颈 \(n/2\) 次,每次增广至少饱和一条弧)。
- 时间复杂度:每次 BFS 耗时 \(O(m)\),总时间为 \(O(nm^2)\)。通常文献记为 \(O(VE^2)\))。
最大容量增广路 (Largest Augmenting Path)
除了最短路径策略,Edmonds-Karp 在其原始论文中也分析了最大容量增广路策略。
- 策略:每次选择残差容量最大的增广路径。
- 实现:可通过修改 Dijkstra 算法或二分搜索容量阈值实现。
- 复杂度:增广次数为 \(O(m \log U)\),总时间复杂度 \(O(m^2 \log m \log U)\)。
- 对比:虽然依赖容量 \(U\),但在某些大容量稀疏图中可能表现良好,但最短增广路 (BFS) 是更严格的多项式时间算法。
| 特性 | Ford-Fulkerson (DFS/任意) | Edmonds-Karp (BFS/最短) |
|---|---|---|
| 增广路选择 | 任意路径 | 边数最少的路径 (BFS) |
| 增广次数 | \(O(v^*)\) (依赖容量,可能指数级) | \(O(nm)\) (多项式级) |
| 总复杂度 | \(O(m \cdot v^*)\) | \(O(nm^2)\) |
| 适用场景 | 小容量整数网络 | 一般网络,理论保证更强 |
| 核心证明工具 | 整数性引理 | 距离标号单调性、瓶颈弧分析 |
Preflow-Push⚓︎
算法范式转变
不同于增广路径算法(如 Ford-Fulkerson, Edmonds-Karp)始终维护可行流(Flow)(即除源汇外所有节点流量守恒),预流推进算法(Preflow-Push)在中间过程维护预流(Preflow)。
- 核心放松:允许中间节点存在超额流量 (Excess),即流入量 \(\ge\) 流出量。
- 推进机制:通过局部操作(Push/Relabel)将超额流量逐步推向汇点,直到所有中间节点超额量为 0,预流变为可行流。
- 优势:无需寻找全局增广路径,适合并行计算及大规模稀疏图。
预流 (Preflow):一个函数 \(x: A \to \mathbb{R}\) 称为预流,如果满足:
- 容量约束:\(0 \leq x_{ij} \leq u_{ij}, \forall (i, j) \in E\)
- 超额非负:对于所有中间节点 \(i \in V \setminus \{s, t\}\),其超额流量 \(e(i)\) 满足:
\[ e(i) = \sum_{j \in N} x_{ji} - \sum_{j \in N} x_{ij} \geq 0 \]
- 物理意义:中间节点可以“暂时存储”流量,不要求即时守恒。源点 \(s\) 可以有净流出,汇点 \(t\) 可以有净流入。
Distance Labels
为了指导流量向汇点推进,算法维护一个距离标号函数 \(d: N \to \mathbb{Z}_{\geq 0}\)。
有效距离标号 (Valid Distance Labels)
对于残差网络 \(G(x)\),距离标号 \(d\) 是有效的,如果满足:
- \(d(t) = 0\)
- 对于所有残差弧 \((i, j) \in G(x)\),满足 \(d(i) \leq d(j) + 1\)
若 \(d\) 是有效标号,则 \(d(i)\) 是残差网络中节点 \(i\) 到汇点 \(t\) 的最短路径长度的下界。 * 推论:若 \(d(i) \geq n\),则残差网络中不存在从 \(i\) 到 \(t\) 的路径。
残差网络中的弧 \((i, j)\) 称为容许弧,如果:
- 残差容量 \(r_{ij} > 0\)
-
满足 tight 约束:\(d(i) = d(j) + 1\)
-
意义:流量只能沿着距离标号严格递减 1 的方向推进(即“下坡”)。
算法通过两种基本操作来消除超额流量:
1) 推进操作 (Push)⚓︎
Push(i, j)
若节点 \(i\) 是活跃节点(\(e(i) > 0\))且存在容许弧 \((i, j)\):
- 推进量:\(\delta = \min \{ e(i), r_{ij} \}\)
- 更新:
- \(x_{ij} \leftarrow x_{ij} + \delta\)
- \(e(i) \leftarrow e(i) - \delta\)
- \(e(j) \leftarrow e(j) + \delta\)
- 更新残差容量 \(r_{ij}, r_{ji}\)
- 分类:
- 饱和推进 (Saturating Push):若 \(\delta = r_{ij}\),弧 \((i, j)\) 被饱和,从残差网络消失。
- 非饱和推进 (Non-saturating Push):若 \(\delta = e(i) < r_{ij}\),节点 \(i\) 不再活跃。
2) 重标号操作 (Relabel)⚓︎
Relabel(i)
若节点 \(i\) 是活跃节点(\(e(i) > 0\))但不存在容许弧:
- 操作:升高 \(i\) 的标号,使其能够向邻居推流。
- 更新:\(d(i) \leftarrow \min \{ d(j) + 1 : (i, j) \in A, r_{ij} > 0 \}\)
- 性质:重标号后,至少产生一条新的容许弧。\(d(i)\) 单调不减。
Algorithm Preflow-Push (Goldberg-Tarjan):
Input: Network G=(N, A), capacities u, source s, sink t
Output: Maximum flow x
1. Preprocessing:
x := 0
d(s) := n, d(i) := 0 for all i != s (或反向 BFS 初始化)
for each arc (s, j) do
x_sj := u_sj (饱和源点出弧)
e(j) := u_sj
e(s) := e(s) - u_sj
2. Main Loop:
while there exists an active node i (e(i) > 0, i != s, t) do
if exists admissible arc (i, j) then
Push(i, j)
else
Relabel(i)
3. Termination:
Convert preflow to flow (将 s 上方多余流量退回,或直接忽略)
return x
分析概要:
- Relabel 操作:每个节点最多重标号 \(2n\) 次,总时间 \(O(nm)\)。
- 饱和推进 (Saturating Pushes):每条弧最多饱和 \(O(n)\) 次,总次数 \(O(nm)\)。
- 非饱和推进 (Non-saturating Pushes):这是瓶颈。
- 势函数:\(\Phi = \sum_{i \in Active} d(i)\)。
- 变化分析:
- 每次非饱和推进,\(\Phi\) 至少减少 1(活跃节点 \(i\) 消失或 \(d(i)\) 减小)。
- Relabel 和饱和推进会增加 \(\Phi\),但总增加量受限(\(O(n^2 m)\))。
- 结论:非饱和推进总次数为 \(O(n^2 m)\)。
Advanced Variants⚓︎
为了进一步降低复杂度, 有两种基于缩放 (Scaling) 和启发式选择的改进。
| 算法变体 | 策略 | 非饱和推进次数 | 总复杂度 | 备注 |
|---|---|---|---|---|
| Generic Preflow-Push | 任意活跃节点 | \(O(n^2 m)\) | \(O(n^2 m)\) | 基础版本 |
| Highest Level Pushing | 选 \(d(i)\) 最大的活跃节点 | \(O(n^2 \sqrt{m})\) | \(O(n^2 \sqrt{m})\) | 理论最优之一 |
| Excess Scaling | 限制超额量 \(\Delta\) 缩放 | \(O(n^2 \log U)\) | \(O(nm + n^2 \log U)\) | 适合大容量图 |
最高标号预流推进 (Highest Level Pushing)
策略
每次选择距离标号 \(d(i)\) 最大的活跃节点进行推进。 * 复杂度:\(O(n^2 \sqrt{m})\)。 * 分析工具:更复杂的势函数 \(\Phi = \sum_{j} (\text{active nodes } i \text{ with } d(i) \geq d(j))\)。 * 阶段分析:将操作分为“阶段 (Phases)",每个阶段内最高标号不变。
超额缩放算法 (Excess Scaling Algorithm)
策略
引入参数 \(\Delta\),仅处理超额量 \(e(i) \geq \Delta/2\) 的节点。 * 流程:初始 \(\Delta\) 为大容量,逐步减半 (\(\Delta \leftarrow \Delta/2\))。 * 复杂度:\(O(nm + n^2 \log U)\)。 * 优势:避免了小流量多次推进,类似容量缩放思想。
没问题,将之前的三个表格合并为一个综合对比总表是一个非常好的主意。这样可以一目了然地看到所有算法的演进路线、复杂度差异以及适用场景。
以下是为你整理的最大流算法综合对比总表,建议放在笔记的最后部分作为总结。
总结⚓︎
涵盖了从基础 Ford-Fulkerson 到高级预流推进算法的核心对比。
| 算法家族 | 算法名称 | 核心策略 | 维护状态 | 关键操作 | 操作次数界限 | 总时间复杂度 | 证明工具/备注 |
|---|---|---|---|---|---|---|---|
| 增广路径法 (Augmenting Path) |
Ford-Fulkerson (Lec 09) |
任意增广路径 (DFS/任意) |
可行流 (Flow) |
寻找路径 增广 (Augment) |
增广次数: \(O(v^*)\) 或 \(O(nU)\) |
\(O(m \cdot v^*)\) | 整数性引理。 容量为无理数时可能不收敛;适合小容量整数网络。 |
| ^ | Edmonds-Karp (Lec 10) |
最短增广路径 (BFS) |
可行流 (Flow) |
寻找最短路径 增广 (Augment) |
增广次数: \(O(nm)\) |
\(O(n^2 m)\) | 距离标号单调性。 多项式时间保证,与容量无关;适合一般网络。 |
| ^ | Capacity Scaling (Lec 12) |
容量缩放 (只选容量 \(\ge \Delta\) 的路径) |
可行流 (Flow) |
寻找 \(\Delta\)-路径 增广 (Augment) |
增广次数: \(O(m \log U)\) |
\(O(nm \log U)\) | 几何收敛性。 适合大容量网络;避免小流量多次增广。 |
| 预流推进法 (Preflow-Push) |
Generic Preflow-Push (Lec 11) |
任意活跃节点 (Active Node) |
预流 (Preflow) |
推进 (Push) 重标号 (Relabel) |
非饱和推进: \(O(n^2 m)\) |
\(O(n^2 m)\) | 势函数 \(\Phi=\sum d(i)\)。 基础版本;理论分析基准;局部操作。 |
| ^ | Highest Level Pushing (Lec 12) |
选 \(d(i)\) 最大的活跃节点 | 预流 (Preflow) |
推进 (Push) 重标号 (Relabel) |
非饱和推进: \(O(n^2 \sqrt{m})\) |
\(O(n^2 \sqrt{m})\) | 阶段分析 (Phases)。 理论最优之一;实际效率极高;适合大规模图。 |
| ^ | Excess Scaling (Lec 12) |
限制超额量 \(\Delta\) 缩放 | 预流 (Preflow) |
推进 (Push) 重标号 (Relabel) |
非饱和推进: \(O(n^2 \log U)\) |
\(O(nm + n^2 \log U)\) | 势函数 \(\Phi=\sum e(i)d(i)/\Delta\)。 结合缩放与推进;适合大容量网络。 |
符号说明
- \(n\): 节点数 (Nodes)
- \(m\): 弧数 (Arcs)
- \(U\): 最大容量 (Max Capacity)
- \(v^*\): 最大流值 (Max Flow Value)