Danzig-Wolfe Decomposition: DW 分解⚓︎
约 2596 个字 1 张图片 预计阅读时间 9 分钟 总阅读量 次
一种用来求解大规模线性规划问题 (Large Scale Linear Programming) 的算法。
推荐视频:DW Decomposition(YouTube) | 带分块的DW分解:例题;
我们依然看最简单的LP的问题描述:
\[
\begin{aligned}
\min & c^{\top}x \\
\text{s.t.} & Ax = b, \\[-2pt]
& x \in X
\end{aligned}
\]
-
\(X\subseteq\mathbb{R}^n\) 为一个多面体,所谓的 “easy constraints” 描述,是因为 \(X\) 的限制(如单纯的界限、区间或网络流平衡)往往局部且易处理,可在子问题里独立优化;
-
\(Ax = b\) 被视为 “complicating constraints”。
同时,DW分解离不开一个重要的数学定理:极点表示定理 (Extreme Point Representation Theroem):
极点表示定理
对于 有界 多面体,所有可行点都能写成极点的凸组合(权重非负且和为 1)。
设 \(X \subseteq \mathbb{R}^{n}\) 是一个非空、有界的多面体,其全部极点构成集合
\[
\mathcal{V}(X) = \bigl\{\,x^{1},\,x^{2},\,\dots,\,x^{t}\bigr\}.
\]
则必有
\[
X = \operatorname{conv}\{x^1,\dots,x^t\}
= \Bigl\{\,\sum_{j=1}^{t}\lambda_j x_{j} \Bigm|
\lambda_j\!\ge\!0, \sum_{j=1}^{t}\lambda_j = 1 \Bigr\}.
\]
你可以理解为,对于任意一个多面体内的向量,我们都可以用一种统一的、优美的方式(极点的凸组合)进行表达,而这个被表示的向量,就是我们大规模LP问题中的 \(\mathbf{x}\)。
我们充分利用极点表示定理,去重写原问题中的 \(x\) 决策变量向量,就是:
\[
\begin{aligned}
z^{*} = \min_{\lambda} & \sum_{j=1}^{t} (c^{\top}x_{j})\,\lambda_{j} \\[4pt]
\text{s.t.} & \sum_{j=1}^{t} (A x_{j})\,\lambda_{j} = b, \\[2pt]
& \sum_{j=1}^{t} \lambda_{j} = 1, \\[2pt]
& \lambda_{j} \ge 0 \quad (j=1,\dots,t).
\end{aligned}
\]
这个变形就是DW- formulation,我们暂时叫他主问题(Master Problem)。重点在于把未知的决策变量 x 都转化成了极点的凸组合,考虑到极点已知了,我们真正的决策变量变成了 \(\lambda_j\) 。换句话讲,新的 formulation中任意一个可行解都对应原问题的一个可行解,其目标函数也是相同的:我们将目标函数和 \(Ax=b\) 投影到 \(\lambda\) 空间。
如何处理过多的极点⚓︎
原问题的 X 是一个多面体,考虑到大规模问题会有很多的极向量,似乎上面这种变形是无用的:每一列 \((x_{j},\,c^{\top}x_{j},\,A x_{j})\) 对应一个极点,也称 列,列数 \(t\) 常常巨大甚至无穷,因此不直接全部生成,而是……
-
列生成 (Column Generation)
- 先解一个含少量列的受限主问题 (RMP)。利用对偶信息在子问题(通常是以 \(X\) 为可行域的优化模型)中寻找能改进目标的 定价列。
- 迭代加入新列直到无列具负 reduced-cost,主问题最优即原 LP 最优。
-
定价(Pricing)
- 将耦合难点集中在主问题的少量方程 ( \(Ax=b\)、\(\sum\lambda=1\) ) 中;
- 子问题仅含“易约束” X,可并行或用专门算法高效解决;
- 在大规模或分块结构 LP(车辆路径、列车时刻、装箱等)中显著降低求解难度。
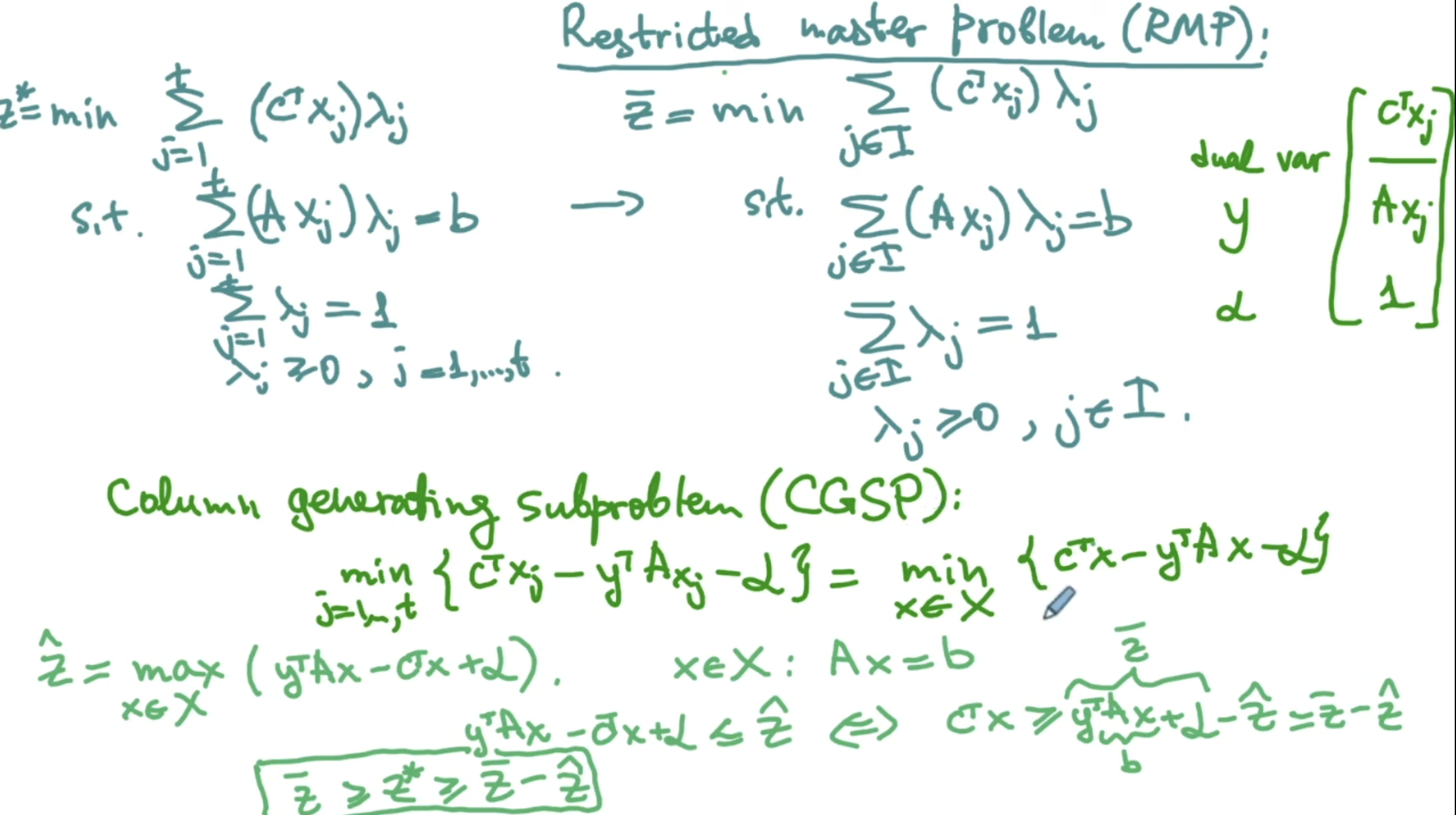
之所以叫前面的问题为主问题就是因为需要遍历所有的极点,而如果我们不计算所有的极点,而是仅仅利用一部分极点,那么得到的解还是可行的,只不过不一定是最优解,也就是说,提供了原问题的一个上界(Upper Bound),因此我们把这个仅仅利用了一部分极点 (A small subset of extreme points) 的模型称为Restricted Master Problem (RMP),重点是它不需要遍历所有的极点,因此我们的下标是一个索引的子集:
\[
\begin{aligned}
\bar z =
\min_{\lambda} &\sum_{j\in I} (c^{\top}x_{j})\,\lambda_{j}\\[2pt]
\text{s.t.} &\sum_{j\in I}(A x_{j})\,\lambda_{j}=b \quad(\text{dual var } y \rightarrow Ax_j)\\
&\sum_{j\in I}\lambda_{j}=1 \quad(\text{dual var } \alpha \rightarrow 1)\\
&\lambda_{j}\ge 0, j\in I,
\end{aligned}
\]
其中 \(I\) 是已生成列(一部分极点的)索引集合 。
此时我们需要检查Reduced Cost是否 < 0,这样我们就需要找最小的 Reduced Cost,如果发现最小的Reduced Cost < 0 的话,那么说明需要找新的列加进去,否则的话,就说明已经找到了最优解。
那么我们加进去的列是什么呢?加进去的列就是一个极点!我们之所以是RMP就是因为加进去的极点不充分,而我们现在能够找到一个对解有提升的极点了!
这里需要引入我们的子问题,或者叫做 Column Generation Subproblem (CGSP) ,这个子问题的目的是找到最小的Reduced Cost,其决策变量是极点表示向量里的系数 \(\lambda\) 并且目标函数看这个Reduced Cost 是否 \(< 0\),如果是,那么这个最优解对应的决策变量就对应了一个新的列,我们把它加入进主问题就(可能)改进主问题的求解质量了;反之,如果 \(\geq 0\),说明所有的检验数都非负,那么原问题就最优了。
我们的 Column Generation Subproblem (CGSP) 就可以表示为:
\[
\hat z =
\min_{j\in 1,..,t}\bigl\{c^{\top}x_j - y^{\top}A x_j - \alpha \bigr\}=-\alpha +\min_{x\in X}\bigl\{(c^{\top}-y^{\top}A)x\bigr\}.
\]
\[
\text{若}\hat z < 0 \Longrightarrow \text{找到改进列 } x^{\text{new}} \text{ 并加入 } I.
\]
这里的 \(\alpha\) 对应第二组约束的对偶变量。
我们同样可以用 \(\hat z\) 来衡量生成列的 Bound。考虑到主问题中 \(x \in X: Ax = b\),注意这里对偶问题决策变量实际就是主问题的一个向量(备选的极点向量),所以 \(y^TAx - c^Tx + \alpha \leq \hat z\) 替换 \(Ax = b\),即为 \(y^Tb - c^Tx + \alpha \leq \hat z\)
然后:
\(c^Tx \geq y^Tb + \alpha - \hat z\)
可以发现 \(y^Tb + \alpha\) 偏偏恰好是 RMP 问题对偶问题的最优解。
也就是说: \(c^Tx \geq \bar z - \hat z\),其中 \(\bar z\) 是RMP问题的最优解。这个式子对于原问题任意一个可行的 \(x\) 都是成立的。
进一步地,\(c^Tx\) 是原问题的目标函数,也就是说,RMP 问题最优解和 CGSP 问题最优解的差,表示了原问题目标函数优化的幅度。 也就是说 \(z^{*} \geq \bar z - \hat z\),其中 \(z^{*}\) 是原问题的最优解。考虑到 RMP 问题是原问题的一个约束情况下的解,所以我们有:
\(\bar z \geq z^{*} \geq \bar z - \hat z\)
这是一个很重要的Bound,用来表示每次DW分解每次迭代之后距离最优目标函数还有多远 (How far we are to the optimal).
参考笔记⚓︎
来自GPT:核心逻辑一句话
在每轮迭代里,RMP 给出“当前组合最好怎么配”,CGSP 负责问“还存不存在一列能让目标再降一点?”——二者循环,直到回答是“没有”,这时 列生成 完成,得到原 LP 的最优解与严格界。
代码实战⚓︎
这是个很经典的算法,可以用来解很经典的问题。一个典型的例子是 多商品网络流问题。
在这个Github Repo 能找到一份实现得相当优雅的代码,详细解释了DW分解是如何对多商品网络流问题进行分解的,为什么子问题是一个类似最短路的问题,并且用 Gurobi 进行了求解。
摘抄了一部分原作者的算法如下。简单(详细)介绍了用 DW 分解解决多商品网络流的流程。为了方便将数学模型和代码里的实现对比起来看,下面使用的标记会略微冗长,这是为了方便初学和复习时候快速理解。如果单纯想要了解模型,移步 多商品网络流问题 这个笔记。
这是一个多商品流问题,每一个OD对代表着一个商品。定义网络\(G(N,A)\),其中\(N\)为所有点的集合(代表着交叉口),\(A\) 为所有边的集合(往往代表着连接各个交叉口的路段),每条路段上的通行成本为 \(t_{ij}\)、最大通行容量为 \(c_{ij}\),其中 \((i,j)\in A\)。给定网络上需求的集合 \(W\),该集合中的每一个元素 \(w\in W\)代表着一个起点 \(o\in N\)和终点\(d\in N\) 对\((o,d)\);每一个OD对间有需求\(\lambda_{w}\),用户可以选择的路径集合为\(R_{w}\)。
定义决策变量\(f_{ij}^{w}\),\((i,j)\in A\),\(w\in W\),为OD对\(w\)在边\((i,j)\)上的流量。上述问题可以建模为以下模型:
\[
\begin{aligned}
\min & \sum_{w\in W}\sum_{(i,j)\in A}t_{ij}f_{ij}^{w} \quad{(1)} \\
\text{ s.t.}\sum_{w\in W}f_{ij}^{w} & \leqslant c_{ij},\forall(i, j)\in A \quad{(2)} \\
\sum_{(o, j)\in A}f_{oj}^{w} & =\lambda_{w},\forall w=(o, d)\in W \quad{(3)}\\
\sum_{(i, d)\in A}f_{id}^{w} & =\lambda_{w},\forall w=(o, d)\in W \quad{(4)} \\
\sum_{(i, n)\in A}f_{in}^{w}-\sum_{(n, j)\in A}f_{n, j}^{w}& =0,\forall n\in N-\{o, d\}, w=(o, d)\in W \quad{(5)} \\
f_{ij}^{w}& \geqslant 0,\forall(i, j)\in A,w\in W \quad{(6)}
\end{aligned}
\]
为找到一个初始可行解开始迭代,我们采用大M方法,定义\(M\)为一个足够大的常数,且为每条路段\((i,j)\in A\)定义一个松弛变量\(s_{ij}\)和一个人工变量\(a_{ij}\)。模型变为:
\[
\begin{aligned}
&\min \sum_{w\in W}\sum_{(i,j)\in A}t_{ij}f_{ij}^{w}+M a_{ij} \quad \text{(7)} \\
&\text{s.t.} \quad \sum_{w\in W}f_{ij}^{w}+s_{ij}-a_{ij}=c_{ij}, \quad \forall(i, j)\in A \quad \text{(8)} \\
&\quad \sum_{(o, j)\in A}f_{oj}^{w}=\lambda_{w}, \quad \forall w=(o, d)\in W \quad \text{(9)} \\
&\quad \sum_{(i, d)\in A}f_{id}^{w}=\lambda_{w}, \quad \forall w=(o, d)\in W \quad \text{(10)} \\
&\quad \sum_{(i, n)\in A}f_{in}^{w}-\sum_{(n, j)\in A}f_{n, j}^{w}=0, \quad \forall n\in N-\{o, d\}, w=(o, d)\in W \quad \text{(11)} \\
&\quad f_{ij}^{w}\geqslant 0, \quad \forall(i, j)\in A,w\in W \quad \text{(12)} \\
&\quad s_{ij}, a_{ij}\geqslant 0, \quad \forall(i, j)\in A \quad \text{(13)}
\end{aligned}
\]
其中,目标函数(7)添加了对于人工变量\(a_{ij}\),\((i, j)\in A\)的惩罚项;约束(8)通过松弛变量\(s_{ij}\),\((i, j)\in A\)变为了等式,同时增加了人工变量\(a_{ij}\),\((i, j)\in A\);约束(9)-(12)保持不变;约束(13)为松弛变量和人工变量的定义域。